磁気センサーのデフォルトはパワーダウン状態で、
使う場合は CTRL_REG3_M (22h)のレジスタにMD[1:0] bitsを書き込む必要がある。
( 下位2ビットのデフォルトの0b11はPower-down mode)
ここをを0b01にすると、Single-conversion modeになる。
また、温度補正の出力を得るには、CTRL_REG1_M (20h)レジスタのTEMP_COMPビットを1にする。
レジスタは、CTRL_REG1_M~CTRL_REG5_Mが制御レジスタが0x20~0x24のアドレスで指定できる。
またOUT_X_L_M,OUT_X_H_M、OUT_Y_L_M,OUT_Y_H_M、OUT_Z_L_M,OUT_Z_H_Mで各レジスタでX軸、Y軸、Z軸 の下位と上位バイトを取得できます。
下記は、CTRL_REG1_M指定で、10Hzの周期で測定更新ごとに情報を表示させる検討用プログラムです。
from machine import Pin, I2C
import utime
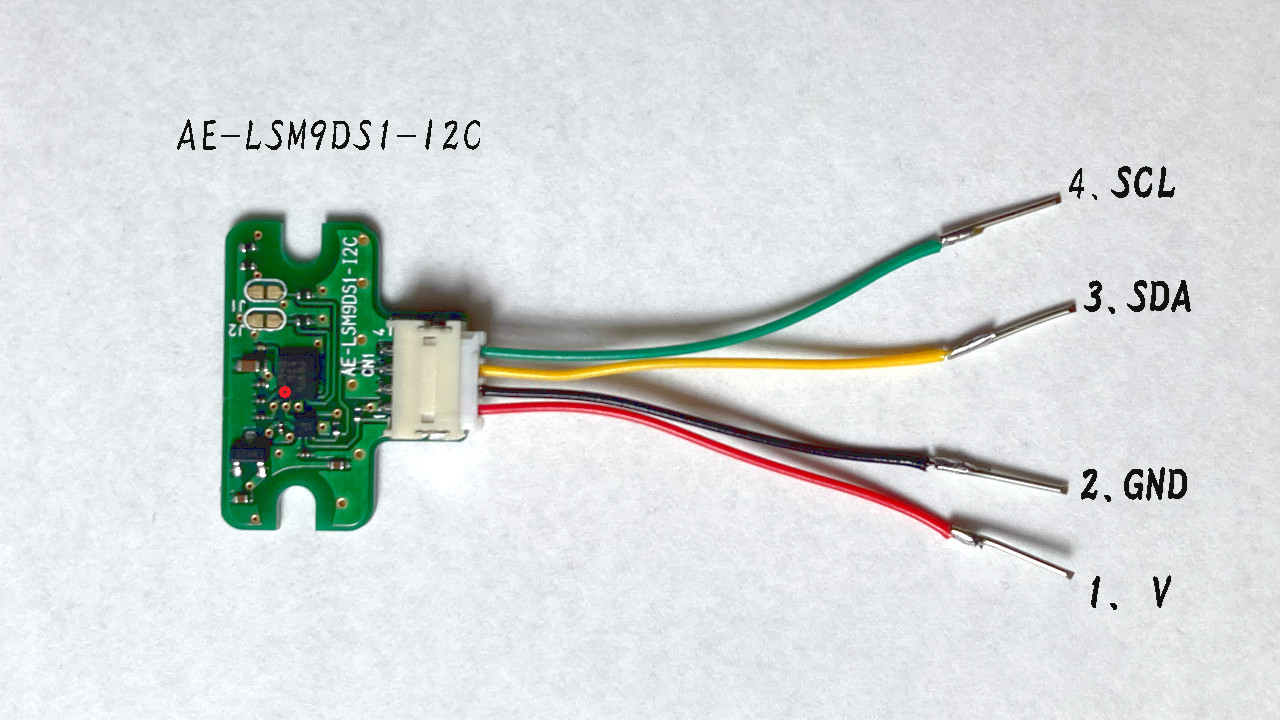
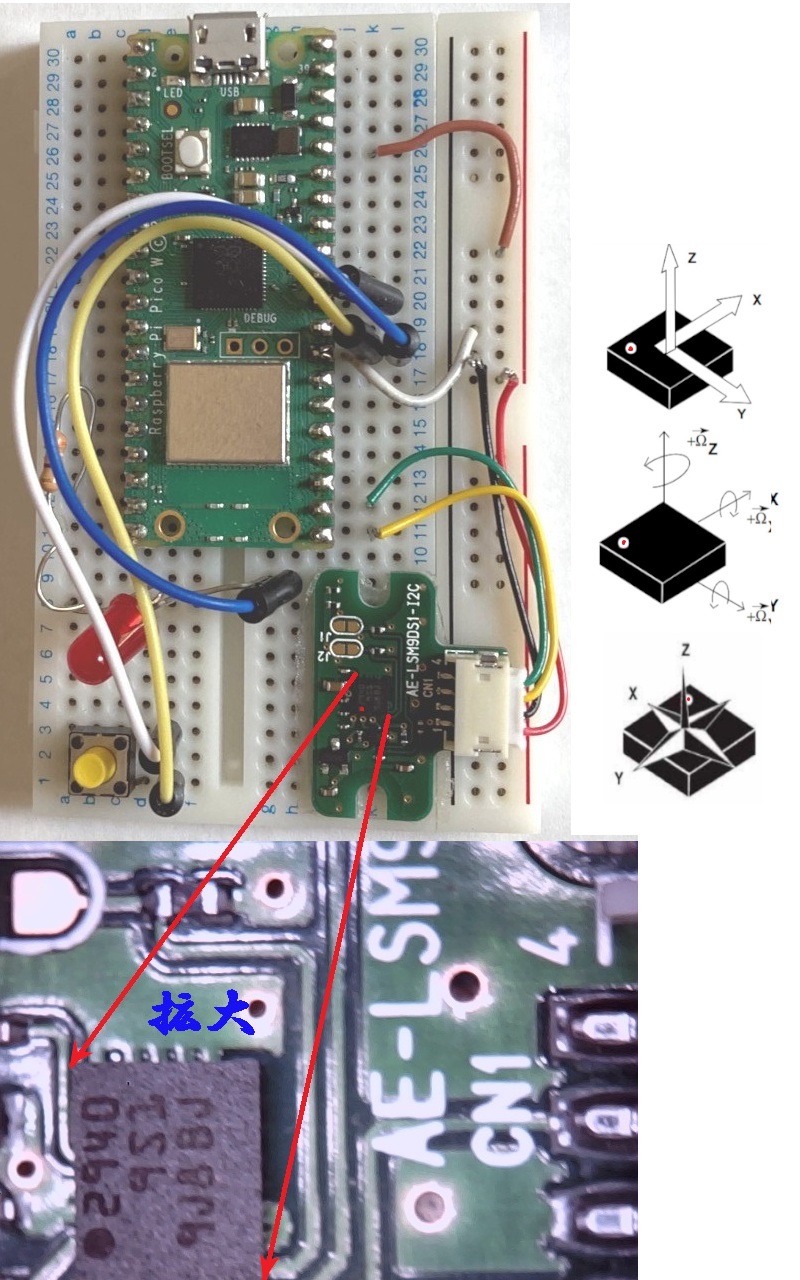
I2C_SDA=16# GP16のジェネラル端子をSDA「Serial Data」に指定用変数
I2C_SCL=17# GP17のジェネラル端子をSCL「Serial Clock」に指定用変数
I2C_CH=0# I2Cのチャンネル指定用変数(Picoでは0と1のチャンネルがある)
I2C_M_ADDR=0x1C#磁力センサのアドレス
# 磁気センサー関連のレジスタ番号と設定値(lsm9ds1.pdf参照)
CTRL_REG1_M_N=0x20# レジスタ番号
CTRL_REG1_M=0b10010000# 温度補正 Low-power mode ODR(output data rate):10Hz デフォルト:00010000
CTRL_REG2_M_N=0x21
CTRL_REG2_M=0b00000000# Full scale:±4gauss デフォルト:00000000
CTRL_REG3_M_N=0x22
CTRL_REG3_M=0b00000000# I2Cのenable Continuous conversion mode デフォルト:00000011
CTRL_REG4_M_N=0x23
CTRL_REG4_M=0b00000000# Z-axis:low power, data LSb at lower address, デフォルト: 00000000
CTRL_REG5_M_N=0x24
CTRL_REG5_M=0b00000000# continuous update デフォルト: 00000000
STATUS_REG_M=0x27# 状態
OUT_X_L_M=0x28
OUT_X_H_M=0x29
OUT_Y_L_M=0x2A
OUT_Y_H_M=0x2B
OUT_Z_L_M=0x2C
OUT_Z_H_M=0x2D
OFFSET_X_REG_L_M=0x05
# SCL はスタンダードモードの100KHzの通信モードで、I2Cを初期化
i2c=I2C( I2C_CH, scl=Pin(I2C_SCL), sda=I2C_SDA, freq=100000)
for addr in i2c.scan(): print( f"enabled address:{addr:02x}" )
#磁力センサのアドレスを指定して、各レジスタを設定
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG1_M_N, bytes([CTRL_REG1_M]))
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG2_M_N, bytes([CTRL_REG2_M]))
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG3_M_N, bytes([CTRL_REG3_M]))
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG4_M_N, bytes([CTRL_REG4_M]))
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG5_M_N, bytes([CTRL_REG5_M]))
CTRL_REG3_M_N=0x22
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG3_M_N, bytes([0x0]))
while True:
while True:
statu=i2c.readfrom_mem( I2C_M_ADDR, STATUS_REG_M,1)
#print(f"statu:{statu[0]:08b}", end=" ")
if statu[0] & 0x80 : break # 更新があれば?
bxl=i2c.readfrom_mem( I2C_M_ADDR, OUT_X_L_M,1) # X軸
bxh=i2c.readfrom_mem( I2C_M_ADDR, OUT_X_H_M,1)
byl=i2c.readfrom_mem( I2C_M_ADDR, OUT_Y_L_M,1) # Y軸
byh=i2c.readfrom_mem( I2C_M_ADDR, OUT_Y_H_M,1)
bzl=i2c.readfrom_mem( I2C_M_ADDR, OUT_Z_L_M,1) # Z軸
bzh=i2c.readfrom_mem( I2C_M_ADDR, OUT_Z_H_M,1)
bin=[bxl[0],bxh[0], byl[0],byh[0], bzl[0],bzh[0]]
print(bin)
pass
bin=i2c.readfrom_mem( I2C_M_ADDR, OUT_X_L_M, 6) # X軸~Z軸
bin=[v for v in bin]
print( bin )
pass
bin=i2c.readfrom_mem( I2C_M_ADDR, OFFSET_X_REG_L_M, 6)
bin=[v for v in bin]
print( bin )
上記の実行結果例を以下に示します。
[9, 5, 73, 6, 172, 244]
[9, 5, 73, 6, 172, 244]
[0, 0, 0, 0, 0, 0]
[235, 4, 108, 6, 121, 244]
[235, 4, 108, 6, 121, 244]
[0, 0, 0, 0, 0, 0]
[9, 5, 58, 6, 189, 244]
[9, 5, 58, 6, 189, 244]
[0, 0, 0, 0, 0, 0]
[231, 4, 95, 6, 207, 244]
[231, 4, 95, 6, 207, 244]
[0, 0, 0, 0, 0, 0]
[13, 5, 57, 6, 176, 244]
[13, 5, 57, 6, 176, 244]
[0, 0, 0, 0, 0, 0]
・・・以下省略
上記の
の部分は個々のレジスタを指定で情報を得ているのに対し、
は、アドレスとして先頭となるOUT_X_L_Mを指定し、そこから並ぶ6byteの情報を取得しています。
両者は同じ情報を得ており、
例えば
[13, 5, 57, 6, 176, 244]であれば、
X軸の下位byteが13で上位byteが5、Y軸の下位byteが57で上位byteが6、Z軸の下位byteが176で上位byteが244 と並んでいます。
以上でアクセス方法が分かったので、磁気センサーのX軸,Y軸,Z軸の16byte情報を表示するコードは次のようになりました。
from machine import Pin, I2C
import utime
I2C_SDA=16# GP16のジェネラル端子をSDA「Serial Data」に指定用変数
I2C_SCL=17# GP17のジェネラル端子をSCL「Serial Clock」に指定用変数
I2C_CH=0# I2Cのチャンネル指定用変数(Picoでは0と1のチャンネルがある)
I2C_M_ADDR=0x1C#磁力センサのアドレス
# 磁気センサー関連のレジスタ番号と設定値(lsm9ds1.pdf参照)
CTRL_REG1_M_N=0x20# レジスタ番号
CTRL_REG1_M=0b10010000# 温度補正 Low-power mode ODR:10Hz デフォルト:00010000
CTRL_REG2_M_N=0x21
CTRL_REG2_M=0b00000000# Full scale:±4gauss デフォルト:00000000
CTRL_REG3_M_N=0x22
CTRL_REG3_M=0b00000000# I2Cのenable Continuous conversion mode デフォルト:00000011
CTRL_REG4_M_N=0x23
CTRL_REG4_M=0b00000000# Z-axis:low power, data LSb at lower address, デフォルト: 00000000
CTRL_REG5_M_N=0x24
CTRL_REG5_M=0b00000000# continuous update デフォルト: 00000000
STATUS_REG_M=0x27# 状態
OUT_X_L_M=0x28 # このアドレスより、OUT_X_H_M、OUT_Y_L_M、OUT_Y_H_M、OUT_Z_L_M、OUT_Z_H_Mレジスタが並ぶ
OFFSET_X_REG_L_M=0x05
# SCL はスタンダードモードの100KHzの通信モードで、I2Cを初期化
i2c=I2C( I2C_CH, scl=Pin(I2C_SCL), sda=I2C_SDA, freq=100000)
#for addr in i2c.scan(): print( f"enabled address:{addr:02x}" )
#磁力センサのアドレスを指定して、各制御レジスタを設定
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG1_M_N, bytes([CTRL_REG1_M]))
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG2_M_N, bytes([CTRL_REG2_M]))
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG3_M_N, bytes([CTRL_REG3_M]))
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG4_M_N, bytes([CTRL_REG4_M]))
i2c.writeto_mem( I2C_M_ADDR, CTRL_REG5_M_N, bytes([CTRL_REG5_M]))
import math
while True:
while True: # データ更新を待つ
statu=i2c.readfrom_mem( I2C_M_ADDR, STATUS_REG_M,1)
#print(f"statu:{statu[0]:08b}", end=" ")
if statu[0] & 0x80 : break
bin=i2c.readfrom_mem( I2C_M_ADDR, OUT_X_L_M, 6) # X,Y,Z軸の磁気センサー情報取得
#print( [v for v in bin] )
magbin=[bin[n] + (bin[n+1]<<8) for n in range(0,len(bin),2)] # 2byteからuint16へ変換
magbin=[v if v <= 32767 else v - 65536 for v in magbin] # uint16からint16へ変換
deg = math.atan(magbin[1]/magbin[0]) * 360 / math.pi / 2 # 角度算出
print( f"X:{magbin[0]:6}, Y:{magbin[1]:6}, Z:{magbin[2]:6} , deg={deg:5.2f}" )
utime.sleep(0.5)
上記の実行例を以下に示しています。0.5秒ごとに計測結果(x,y,z,y/xのアークタンジェントの角度)を表示しています。
X: 2732, Y: 1768, Z: -573 , deg=32.91
X: 2706, Y: 1786, Z: -671 , deg=33.43
X: 2649, Y: 1797, Z: -604 , deg=34.15
X: 2673, Y: 1821, Z: -581 , deg=34.26
X: 2653, Y: 1817, Z: -609 , deg=34.41
X: 2639, Y: 1858, Z: -606 , deg=35.15
X: 2751, Y: 1741, Z: -590 , deg=32.33
X: 2828, Y: 1721, Z: -669 , deg=31.32
X: 2871, Y: 1596, Z: -641 , deg=29.07
X: 3096, Y: 922, Z: -747 , deg=16.58
X: 3110, Y: 631, Z: -750 , deg=11.47
X: 2934, Y: -15, Z: -911 , deg=-0.29
X: 2232, Y: -377, Z: -945 , deg=-9.59
X: 1216, Y: -598, Z: -842 , deg=-26.19
X: 966, Y: -494, Z: -900 , deg=-27.08
X: 144, Y: -7, Z: -930 , deg=-2.78
X: -13, Y: 202, Z: -977 , deg=-86.32
X: -255, Y: 557, Z: -958 , deg=-65.40
X: -299, Y: 1012, Z: -1080 , deg=-73.54
X: -315, Y: 1517, Z: -1223 , deg=-78.27
X: -329, Y: 2172, Z: -1348 , deg=-81.39
X: -313, Y: 2270, Z: -1342 , deg=-82.15
X: -263, Y: 2541, Z: -1356 , deg=-84.09
X: 70, Y: 3050, Z: -1245 , deg=88.69
X: 827, Y: 3621, Z: -1234 , deg=77.13
X: 1110, Y: 3754, Z: -1322 , deg=73.53
X: 1736, Y: 3585, Z: -1173 , deg=64.16
X: 2810, Y: 2619, Z: -775 , deg=42.99
X: 2898, Y: 2156, Z: -688 , deg=36.65
X: 2846, Y: 1817, Z: -647 , deg=32.56
X: 2751, Y: 1583, Z: -552 , deg=29.92
X: 2725, Y: 1583, Z: -545 , deg=30.15
X: 2701, Y: 1607, Z: -549 , deg=30.75
X: 2715, Y: 1585, Z: -491 , deg=30.28
X: 2727, Y: 1555, Z: -513 , deg=29.69
X: 2715, Y: 1561, Z: -480 , deg=29.90
X: 2713, Y: 1625, Z: -460 , deg=30.92
X: 2737, Y: 1569, Z: -544 , deg=29.82
X: 2725, Y: 1569, Z: -547 , deg=29.93
X: 2697, Y: 1569, Z: -475 , deg=30.19
X: 2695, Y: 1517, Z: -500 , deg=29.37
X: 2706, Y: 1535, Z: -448 , deg=29.56
上記の実行中に、ブレッドボードを左へ1回転させています。それにより、角度が約30度→約0度→約-90度→約90度→約30度と変化しています。
実験の結果ですが、X軸が最大になる時、X軸が北を向いてしました。
ジャイロセンサーの動作チェック
まず、ジャイロセンサー(角速度センサー)の主要レジスタを次のように設定しています。
CTRL_REG1_G (10h) に測定周期(ODR:output data rate)を書き込むことで、ジャイロセンサー(角速度センサー)使用を設定する。
(帯域幅(BW:bandwidth)の設定も行う)
CTRL_REG2_G (11h) で、lsm9ds1.pdfのFigure 28.の block diagramにおけるINT_SELとOUT_SELを指定しているが、分からないのでデフォルト値を利用。
CTRL_REG3_G (12h) デフォルト値を利用(High-pass filter F disableなど)
OUT_TEMP_L (15h), OUT_TEMP_H (16h)で温度データも取得できるようであるが、利用していません。
STATUS_REG (17h) のレジスタで、ジャイロセンサーのGDAのビットが1であれば新しいデータがあると判断できる。
ジャイロセンサーのデータは、OUT_X_G (18h - 19h)、OUT_Y_G (1Ah - 1Bh)、OUT_Z_G (1Ch - 1Dh)の読み込み専用レジスタを使う。
以上を使って、ジャイロセンサー(角速度センサー)のX軸,Y軸,Z軸の16byte符号あり整数の情報を、表示し続けるコードで試してみました。
from machine import Pin, I2C
import utime
I2C_SDA=16# GP16のジェネラル端子をSDA「Serial Data」に指定用変数
I2C_SCL=17# GP17のジェネラル端子をSCL「Serial Clock」に指定用変数
I2C_CH=0# I2Cのチャンネル指定用変数(Picoでは0と1のチャンネルがある)
I2C_AG_ADDR=0x6a#加速センサとジャイロセンサのアドレス
# SCL はスタンダードモードの100KHzの通信モードで、I2Cを初期化
i2c=I2C( I2C_CH, scl=Pin(I2C_SCL), sda=I2C_SDA, freq=100000)
for addr in i2c.scan(): print( f"enabled address:{addr:02x}" )
# ジャイロのセンサー関連のレジスタ番号と設定値(lsm9ds1.pdf参照)
CTRL_REG1_G_N=0x10# レジスタ番号
CTRL_REG1_G=0b01000000# 角速度センサ制御レジスタ デフォルト:00000000
#CTRL_REG1_G[7~5]のODR_G:010 測定周期59.5Hz
#CTRL_REG1_G[4~3]のFS_G:00 Gyroscope full-scaleを245 dps
#CTRL_REG1_G[1~0]のBW_G:00 帯域幅
CTRL_REG2_G_N=0x11
CTRL_REG2_G=0b00000000# デフォルト:00000000
CTRL_REG3_G_N=0x12
CTRL_REG3_G=0b00000000# デフォルト:00000000
STATUS_REG=0x17# 状態
OUT_X_G=0x18 # このアドレスより、OOUT_Y_G (1Ah - 1Bh)、OUT_Z_G (1Ch - 1Dh)のレジスタが並ぶ
#各ジャイロセンサレジスタを設定
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG1_G_N, bytes([CTRL_REG1_G]))
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG2_G_N, bytes([CTRL_REG2_G]))
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG3_G_N, bytes([CTRL_REG3_G]))
while True:
while True:
statu=i2c.readfrom_mem( I2C_AG_ADDR, STATUS_REG,1)
#print(f"statu:{statu[0]:08b}", end=" ")
if statu[0] & 0x02 : break
bin=i2c.readfrom_mem( I2C_AG_ADDR, OUT_X_G, 6) # X,Y,Z軸のジャイロセンサー情報取得
#print( [v for v in bin] )
gyro=[bin[n] + (bin[n+1]<<8) for n in range(0,len(bin),2)]
gyro=[v if v <= 32767 else v - 65536 for v in gyro]
print( gyro )
utime.sleep(0.5)
|
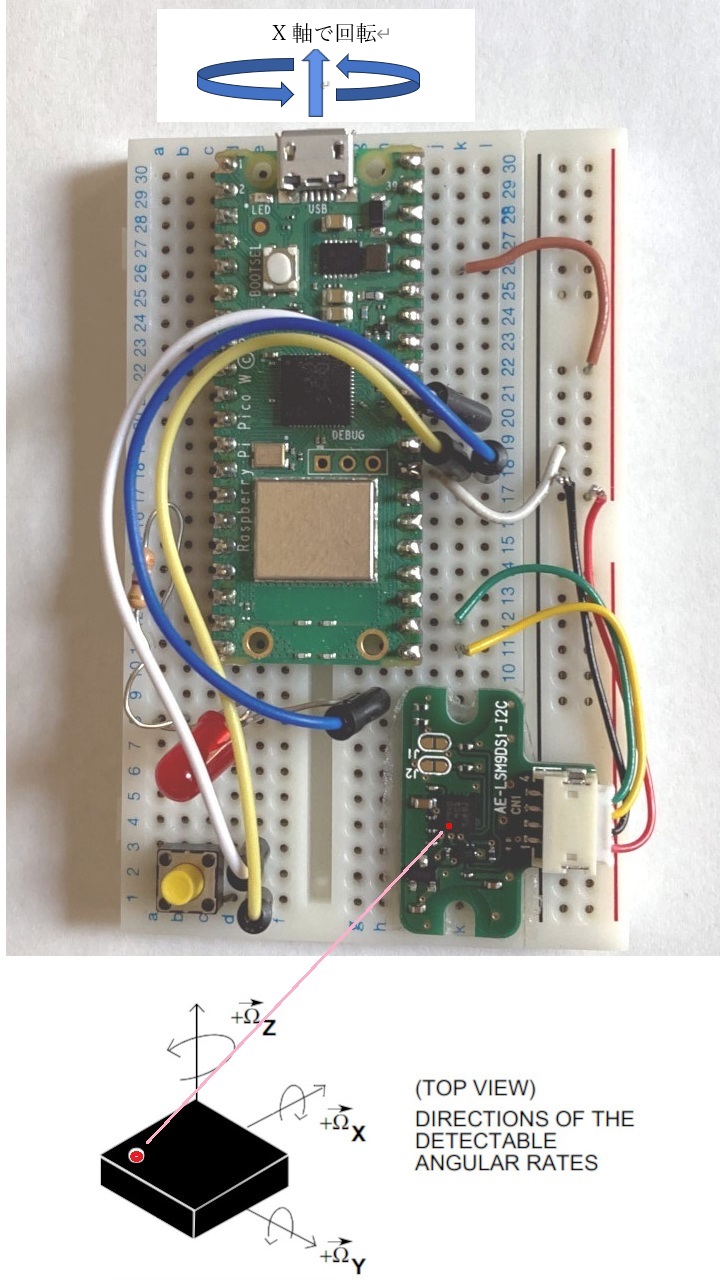
ぶら下げて、手で右矢印のように回転させた時実行結果例
よって、X軸の回転角度の速度がマイナスになっています。
体感的には、合っていると感じました。
[-677, 257, -286]
[102, -509, 269]
[157, -189, 5]
[104, -91, -33]
[-496, -97, -626]
[379, -83, 1084]
[-242, 54, 1022]
[-808, 521, 53]
[-150, 76, 2308]
[-567, 474, 437]
[29, -503, 295]
[1313, -2819, 308]
[-548, -147, -1036]
[-9442, 1418, -1416]
[-3083, -590, 433]
[-2627, -332, -2331]
[-13313, 3791, -3612]
[-5737, 607, -2932]
[-10359, 38, -576]
[-6350, 585, -1068]
[-8663, 1362, -592]
[-7645, 1386, -538]
[-11306, 1614, -819]
[-3794, 530, 404]
[-9136, 1420, -1063]
[-9563, 1262, -629]
[-4040, 2328, 157]
[1833, 400, 1146]
[3814, 6263, -3505]
[-1733, 4808, -1815]
[-325, -78, 12]
[-327, -75, 7]
[-337, -72, 13]
[-318, -77, 9]
[-321, -62, 12]
[-327, -64, 15]
[-309, -84, 12]
最後の方のデータは置いて固定した状態ですが、固定状態で
約[-325, -78, 12]の値になっています。
|
ジャイロのセンサーに対して、加速度センサーの取得動作も追加してチェックする
CTRL_REG1_Gがデフォルトの0x00である場合、ジャイロセンサーはパワーダウン状態となり、加速度センサーだけ使うモードになります。
その場合、加速度センサーの内部の測定周期(ODR:output data rate)をCTRL_REG6_XL (20h)のレジスタの[7~5bit]で設定します。
ですが加速度計とジャイロスコープの複数の読み取りモードの場合、同じ測定周期になるようです。
以下は、前述のジャイロセンサー読み取りコードを追加、変更して作成しました。
なお、FIFO_CTRL (2Eh)レジスタで、FIFO の利用モード指定がありますが、デフォルトの未使用のままです。
from machine import Pin, I2C
import utime
I2C_SDA=16# GP16のジェネラル端子をSDA「Serial Data」に指定用変数
I2C_SCL=17# GP17のジェネラル端子をSCL「Serial Clock」に指定用変数
I2C_CH=0# I2Cのチャンネル指定用変数(Picoでは0と1のチャンネルがある)
I2C_AG_ADDR=0x6a#加速センサとジャイロセンサのアドレス
# SCL はスタンダードモードの100KHzの通信モードで、I2Cを初期化
i2c=I2C( I2C_CH, scl=Pin(I2C_SCL), sda=I2C_SDA, freq=100000)
for addr in i2c.scan(): print( f"enabled address:{addr:02x}" )
# ジャイロのセンサー関連のレジスタ番号と設定値(lsm9ds1.pdf参照)
CTRL_REG1_G_N=0x10# レジスタ番号
CTRL_REG1_G=0b01000000# 角速度センサ制御レジスタ デフォルト:00000000
#CTRL_REG1_G[7~5bit]のODR_G:010 測定周期59.5Hz
#CTRL_REG1_G[4~3bit]のFS_G:00 Gyroscope full-scaleを245 dps
#CTRL_REG1_G[1~0bit]のBW_G:00 帯域幅
CTRL_REG2_G_N=0x11
CTRL_REG2_G=0b00000000# デフォルト:00000000
CTRL_REG3_G_N=0x12
CTRL_REG3_G=0b00000000# デフォルト:00000000
#CTRL_REG3_G でLow-power disabled、High-pass filter desable,Gyroscope high-pass filter cutoff frequency set
STATUS_REG=0x17# 状態
OUT_X_G=0x18 # このアドレスより、OOUT_Y_G (1Ah - 1Bh)、OUT_Z_G (1Ch - 1Dh)のレジスタが並ぶ
#各ジャイロセンサレジスタをを上記の通り設定
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG1_G_N, bytes([CTRL_REG1_G]))
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG2_G_N, bytes([CTRL_REG2_G]))
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG3_G_N, bytes([CTRL_REG3_G]))
# 加速度のセンサー関連のレジスタ番号と設定値
CTRL_REG4_N=0x1E
CTRL_REG4=0b00111000#0,0,Zen_G,Yen_G,Xen_G,0,LIR_XL1,4D_XL1 #デフォルト値:00111000
CTRL_REG5_N=0x1F
CTRL_REG5=0b00111000#0,0,Zen_G,Yen_G,Xen_G,0,LIR_XL1,4D_XL1 #デフォルト値:00111000
CTRL_REG6_XL_N=0x20
CTRL_REG6_XL=0b00000000#デフォルト値:00000000
#CTRL_REG6_XL[7~5bit]はジャイロスコープ利用時無効?で、ジャイロスコープと同じ測定周期
#CTRL_REG6_XL[4~3bit]はAccelerometer full-scale:±2g
#CTRL_REG6_XL[4~3bit]
OUT_X_L_XL=0x28#OUT_X_H_XL,OUT_Y_L_XL,OUT_Y_H_XL,OUT_Z_L_XL,OUT_Z_H_XL
#各加速度のセンサーレジスタを上記の通り設定
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG4_N, bytes([CTRL_REG4]))
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG5_N, bytes([CTRL_REG5]))
i2c.writeto_mem( I2C_AG_ADDR, CTRL_REG6_XL_N, bytes([CTRL_REG6_XL]))
while True:
statu=i2c.readfrom_mem( I2C_AG_ADDR, STATUS_REG,1)
#print(f"statu:{statu[0]:08b}", end=" ")
if statu[0] & 0x02 : # ジャイロセンサー情報あり?
bin=i2c.readfrom_mem( I2C_AG_ADDR, OUT_X_G, 6) # X,Y,Z軸のジャイロセンサー情報取得
#print( [v for v in bin] )
gyro=[bin[n] + (bin[n+1]<<8) for n in range(0,len(bin),2)]
gyro=[v if v <= 32767 else v - 65536 for v in gyro]
print( f"gyroscope:{gyro}" )
if statu[0] & 0x01: # 加速度情報情報あり?
bin=i2c.readfrom_mem( I2C_AG_ADDR, OUT_X_L_XL, 6) # X,Y,Z軸の加速度情報取得
#print( [v for v in bin] )
accel=[bin[n] + (bin[n+1]<<8) for n in range(0,len(bin),2)]
accel=[v if v <= 32767 else v - 65536 for v in accel]
print( f"Accelerometer:{accel}" )
utime.sleep(0.5)
上記の実行例で、ジャイロと加速度センサーの情報を交互に表示しています。
enabled address:1c
enabled address:6a
gyroscope:[-315, -79, 15]
Accelerometer:[-136, -415, 15919]
gyroscope:[-325, -70, 13]
Accelerometer:[-136, -404, 15916]
gyroscope:[-318, -84, 6]
Accelerometer:[-131, -404, 15914]
gyroscope:[-316, -72, 7]
Accelerometer:[-124, -418, 15918]
gyroscope:[-317, -66, 7]
Accelerometer:[-138, -404, 15907]
gyroscope:[-307, -76, 5]
Accelerometer:[-131, -412, 15912]
gyroscope:[-315, -68, 15]
Accelerometer:[-142, -414, 15919]
gyroscope:[-328, -76, 15]
Accelerometer:[-140, -437, 15898]
gyroscope:[-311, -78, 14]