
UMEHOSHI ITA TOP PAGE COMPUTER SHIEN LAB
esp32側をpythonでTCPサーバーにし、それを付けたUMEHOSHI ITA基板側のモータ制御ROM関数を呼び出してモータを動かす構成の紹介です。
(このサーバーに接続するPC側のPython用クライアントは、このページで紹介しています。)
これでPCからWifiを介し、esp32で次の制御を行います。
その制御は、ファイルの転送、esp32側のファイルリスト取得、Pythonファイルの実行です。
よって、Pythonファイルがモータ制御であれば、Wifiを介した遠隔でモータ制御ができます。
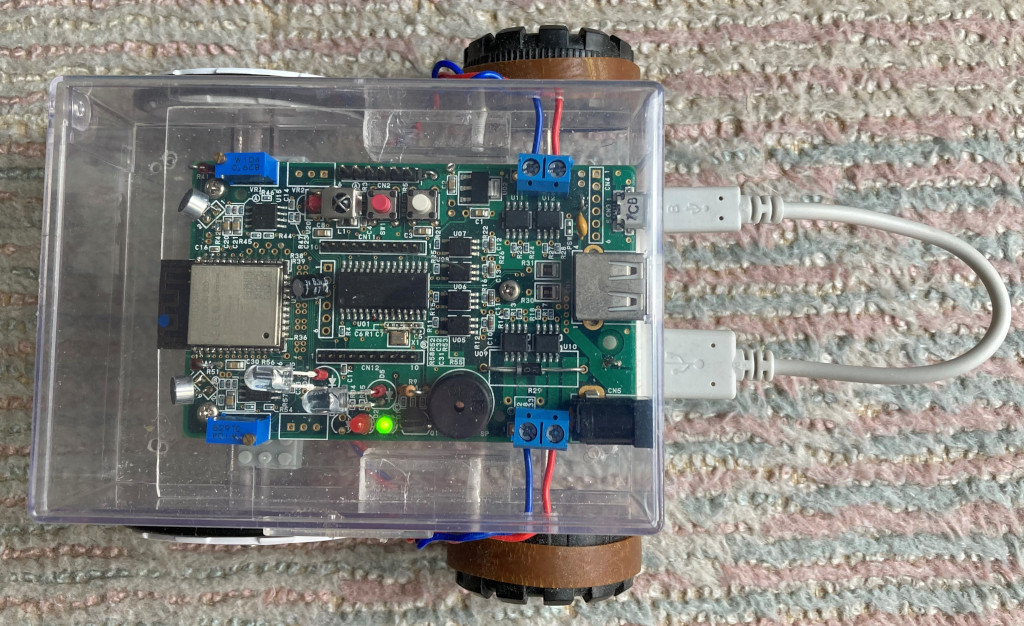
ロボットのハード構成は、こちらのページで紹介しています。
MicroPythonのインストールは、こちらのページで紹介している内容で行います。
これを行うには、UMEHOSHI ITAをスルーモードで行います。
この状態は、PCとUSBで接続してPC側の「Tera Term」のターミナルで、MicroPythonの会話モードが動作できます。
(UMEHOSHI ITAをスルーモードにする操作:
SW1とSW2を押し、SW1を離してLED1が消灯に変わるまでSW2を押す。約3秒)
UMEHOSHI ITAをスルーモードとは、接続したUSBでPCから送った情報がそのままUARTを介してesp32に送られるモードで、逆にesp32が出力した情報はPCへ送信されます。
この状態で、PC側のampyコマンドを使うことにより、esp32へのファイル転送操作やesp32側でのpythonプログラムの実行ができす。
ampyの使い方は、こちらのページで紹介しています。
EEPROM化は、こちらのページで紹介している内容で行います
これを行うには、UMEHOSHI ITAをUART1コマンドモードで行います。
この状態は、UARTでUMEHOSHI ITAで、UART1やUSBで受信した'S'、'R'、'G'から始まる文字列命令「UME専用Hexコマンド」を処理できます。
(なおUMEHOSHI ITAをUART1コマンドモードにする操作は、
SW1とSW2を押し、SW1を離してLED1が消灯し、それから点灯に変わるまでSW2を押す。約4秒)
このROM化により、PCとUSBで接続してPC側の「Tera Term」のターミナルで
EEPROM内のエントリーポイントの文字列を送るだけで、対応する関数を起動できます。
例えば、「Tera Term」からEEPROMのブザーを鳴らすエントリポイントを実行する"R009D020D00003B"の文字列を送ると、
START:9D020D00の応答文字列で応答すると共にブザーが鳴ります。
R009D020D00003B
START:9D020D00
なお、esp32の起動メッセージなど余計な文字列も表示されますが、それは無視してください。
このUMEHOSHI ITAをUART1コマンドモードでは、
esp32がUMEHOSHI ITAをのUART1に接続されるため、
esp32のMicroPythonのprintで出力した'S'、'R'、'G'から始まる文字列は
UMEHOSHI ITAの命令「UME専用Hexコマンド」として処理さているのです。
さて 上記操作は UMEHOSHI ITAをUART1コマンドモードにするために約4秒が必要になっていますが、
その待ち時間無しで初めからUART1コマンドモードで起動させます。
同時にエコーモードオフと、前述のEEPROM内の
モーターのPWM制御などの初期化関数AdrStart(0x9D020010番地)を行う次の関数を、ROM化します。
それには、次のコードをumehoshiEditの開発ツールで実行させます。
#include <xc.h>
#include "common.h"
#define BASE_FUNC 0x9D020000 // EEPROM領域配置用(パワーONでないリセット操作の実行アドレス)
#define AdrEsp32Init (BASE_FUNC+0x1000) // esp32 の初期化関数
#define AdrStart (BASE_FUNC+0x0010) // アプリの起動時の初期ルーチンのアドレス
// esp32 の初期化関数 起動アドレス:0x9D020000+0x1000=0x9D021000
// この0x9D021000を0x9D03fff4番地に記憶しておく予定。
// これで、パワーオン時でSW2(白)スイッチが押した時に実行する。
__attribute__((address( AdrEsp32Init ))) void Esp32Init(void);
void Esp32Init()
{
_set_int_var(_SPECIFIED_flagEcho, 0); // エコー制御変数を0にして、エコーをOFFにする。
_set_int_var(_SPECIFIED_uart_command_mode , 1); // UARTコマンドモードに指定する変数を1。
_set_int_var(_SPECIFIED_mode_change_request , 1); // 上記コマンドモードへの変更要求
void (*func)(void) = (void (*)(void) )AdrStart;//モーター制御の初期化関数アドレスの設定
func(); // 上記モーター制御の初期化
}
上記をumehoshiEditの開発ツールで実行することで、
「エコーOFF、UARTコマンドモード指定、モーター制御の初期化関数」を実行するEsp32Init関数が、0x9D021000番地のROM領域に書き込まれます。
import time # setap.py
time.sleep(5)
import network
ap = network.WLAN(network.AP_IF) # create access-point interface
ap.config(essid='ESP-AP') # set the ESSID of the access point
ap.config(max_clients=10) # set how many clients can connect to the network
ap.ifconfig(('192.168.222.1', '255.255.255.0', '192.168.222.1', '8.8.8.8'))
# set (ip address, subnet mast, default gateway, dns ip address)
ap.active(True) # activate the interface
import os # server.py
import sys
import socket
import _thread
import time
#import esp
#esp.osdebug(None) # ベンダ O/S デバッグメッセージをオフにする
path_datas = "./"
flag_listen_loop=True
sock2=None # TCPクライアントと通信するソケット
def tcp_send_message(sock,msg): # sockのクライアント側にメッセージ送信
bin=('M'+msg+"\r\n").encode("utf-8")
if sock : sock.sendall(bin)
def send(msg):# sock2のクライアント側にメッセージ送信
msg=f"{msg}" # 文字列へ変換
if sock2 is None: return
a=msg.split("\n")
for s in a:
tcp_send_message(sock2,s)
def ls_filelist(sock,path): # ファイルリストの文字列をクライアントに送信
tcp_send_message(sock,"ls_filelist:" + path)
if path == "": path="."
try:
for f_name in os.listdir(path) :
file_info = os.stat(f_name)
file_size = file_info[6]
d_inf = 'dir' if (file_info[0] & 0x4000 ) else ' ' # ディレクトリ判定
msg = f"{d_inf} {file_size:7} {f_name}"
tcp_send_message(sock, msg)
except Exception as e:
tcp_send_message(sock,"ls_filelist Error:" + str(e))
def cat_filepath(sock, filepath): # filepathのテキスト内容をクライアントに送信
tcp_send_message(sock, "cat_filepath:" + filepath)
try:
with open(filepath) as fr:
ss = fr.readlines()
for s in ss:
if s[-1] == '\n' : s=s[:-1] # 改行を除く
tcp_send_message(sock, s)
except Exception as e:
tcp_send_message(sock,"cat_filepath Error:"+ str(e))
def del_filepath(sock, filepath): # filepathのファイルを削除
tcp_send_message(sock, "del_filepath:" + filepath)
try:
os.remove(filepath)
except Exception as e:
tcp_send_message(sock,"del_filepath Error:"+ str(e))
def import_name(sock, name):# nameのモジュールのPythonソースを実行
tcp_send_message(sock, "import_name:" + name)
try:
mod=__import__(name) # 動的なインポートで実行
del sys.modules[name] # 再度インポートできるように開放
except Exception as e:
tcp_send_message(sock,"import_name Error:"+ str(e))
def send_file(sock, filepath):# filepathのファイルをクライアントに送信
try:
idx_last_sep = filepath.rfind('\\')
filename = filepath if idx_last_sep == -1 else filepath[idx_last_sep+1:]
file_info = os.stat(filepath)
filesize = file_info[6]
s = "f{} {}".format(filename, filesize)
bin=(s+"\r\n").encode("utf-8")
sock.sendall(bin) #send filename filesize
if filesize > 0:
with open(filepath, "rb") as f:
bin = f.read(filesize)
sock.sendall(bin) # send binary file
#
tcp_send_message(sock,"server:send_file:"+ filepath)
except Exception as e:
tcp_send_message(sock,"server:send_file Error:"+ str(e))
def recieve_file(sock):# TCPでファイルを受信(1byte受信の繰り返し)
buf=b""
while True:
bin = sock.recv(1)
if bin == b'': break
buf += bin
if buf[-2:] == b"\r\n":
s = buf[0:-2].decode('utf-8')
a=s.split(' ')
filename, filesize = a[0], int(a[1])
f=open( path_datas + filename, "wb") # 受信ファイルの保存
n=0
tcp_send_message(sock,f"Starting to receive {filename}:size={filesize} Please wait.")
while n < filesize:
bin = sock.recv(1)
if bin == b'': break
f.write(bin)
n += 1
if n % 10000 == 0: tcp_send_message(sock,f"\n{n}bytes were received.")
#
f.close()
tcp_send_message(sock,f"\n{filename} size:{filesize}, {n}bytes receive end.")
if filename.endswith(".umh"):
send_cmdfile(sock,filename) # ファイルのコマンド内容をUMEHOSHI ITAへ送信
break
#
#print(filename + ":size=" + str(filesize)) # debug ---------------
def recieve_file_Max(sock):# TCPでファイルを受信(バッファを最大して受信)
buf=b""
while True:
bin = sock.recv(1)
if len(bin) != 1: break
buf += bin
if buf[-2:] == b"\r\n":
s = buf[0:-2].decode('utf-8')
a=s.split(' ')
filename, filesize = a[0], int(a[1])
bin=b""
while len(bin) < filesize:
bin += sock.recv(filesize-len(bin))
with open( path_datas + filename, "wb") as f: # 受信ファイルの保存
f.write(bin)
tcp_send_message(sock,f"Server:'{filename}' {len(bin)}bytes received.")
if filename.endswith(".umh"):
send_cmdfile(sock,filename) # ファイルのコマンド内容をUMEHOSHI ITAへ送信
break
#
#print(filename + ":size=" + str(filesize)) # debug ---------------
def recieve_message(sock): # 受信メッセージに対する処理
global flag_listen_loop
buf=b""
while True:
bin = sock.recv(1)
if len(bin) != 1:
flag_listen_loop = False
return False
#
buf += bin
if buf[-2:] == b"\r\n":
s = buf[0:-2].decode('utf-8').strip()
if s == "end_listen_loop": # 受信文字列がこれと一致するなら終了
flag_listen_loop = False
return False
#
if s.startswith("ls -l"): # ファイルリスト要求に対する送信処理
ls_filelist(sock, s[5:].strip() )
return True
#
if s.startswith("cat "):# ファイル内容表示要求に対する送信処理
cat_filepath(sock, s[4:] )
return True
#
if s.startswith("del "):# ファイル削除要求に対する処理
del_filepath(sock, s[4:] )
return True
#
if s.startswith("import "):# Pythonファイルの実行要求に対する処理
import_name(sock, s[7:] )
return True
#
if s.startswith("get "): # ファイル要求に対するファイル送信
send_file(sock, s[4:] )
return True
#
if s.startswith("exc "): # .umhファイルの内容で、[UMEHOSHI ITA]のUART1に出力する。
send_cmdfile(sock, s[4:] )
return True
#
if len(s)>1 and s[0] in "SRG":
print( s ) # 受信文字列を、UME専用Hexコマンドと判断して、UMEHOSHI ITAへ送信
else:
tcp_send_message(sock,s) # 受信文字列を、TCPクライアントへECHO送信
#
return True
def receiveData(sock): # 受信処理ループ
# tcp_send_message(sock,"start sever receiveData" )
while True:
bin = sock.recv(1)#1byte recieve
if len(bin) != 1: break
if bin == b"f" : recieve_file(sock)
elif bin == b"F" : recieve_file_Max(sock)
elif bin == b"M" : recieve_message(sock)
else:
tcp_send_message(sock,"server receive error:" + str(bin) )
#
# ------------- UART -------------------
flag_input_loop=False
cmd='''S1080007F0000E0FFBD271C00BFAF1800BEAF21F0A003F0
S1080007F10001000C0AF00A0023CF44142340000428C95
S1080007F200009F840000000000000A0023CFC414234B6
S1080007F300000A0033CF84163340000638C000043AC98
S1080007F400000A0023C0C4242340000428C01000424C8
S1080007F50000F0005240100062409F8400000000000E9
S1080007F600021E8C0031C00BF8F1800BE8F2000BD2732
S0880007F70000800E0030000000019
R0080007F000049
''' # 終了を知らせるループビープ音のRAM配置用のUME専用Hexコマンド
log_fw=open( "log.txt", "a") # TCP通信ができない時のesp32への入力状態を記録するログ
#
def input_loop(): # UMEHOSHI ITA のUART1出力を読み取ってTCPクライアントに送信するループ
global flag_input_loop
try:
flag_input_loop = True
s=""
while flag_input_loop:
c = sys.stdin.read(1)
s += c
if c != '\n': continue
if sock2 is None:
log_fw.write(s)
time.sleep(0.1)
s=""
continue
s = s[:-1:] # 最後の改行を除く
if s.strip() != '' : # Response message from ume received by esp32
tcp_send_message(sock2, s + ":Response")
#
time.sleep(0.001)
if s == "end_input_loop": break
s=""
#
tcp_send_message(sock2, "End! input_loop\r\n")
except Exception as e:
# print("Error :" , e) # debug ---------------
tcp_send_message(sock2,"input_loop Error:"+ str(e))
log_fw.write("input_loop Error:"+ str(e) + "\n")
log_fw.close()
# ss のUME専用Hexコマンドを[UMEHOSHI ITA]のUART1に出力する。
def send_cmd( ss, cmdchar="SRG"):# example ss=[S048000800000FFAF000086]
a = ss.split('\n')
for s in a:
s=s.strip()
if s == "" or not s[0] in cmdchar : continue
print( s ) # Command string sent from esp32 to ume
tcp_send_message(sock2, s + ":Command" )
time.sleep(0.1)
# .umhファイルの内容で、[UMEHOSHI ITA]のUART1に出力する。
def send_cmdfile(sock,filepath, cmdchar="SRG"):
try:
with open(filepath , "r", encoding="utf-8") as f:
ss = f.readlines()
if filepath.endswith(".umh") : ss = ss[1:]
ss="".join(ss)
send_cmd( ss, cmdchar) # ss のUME専用Hexコマンドを[UMEHOSHI ITA]のUART1に出力
except Exception as e:
# print("Error :" , e) # debug ---------------
tcp_send_message(sock,"send_cmdfile Error:"+ str(e))
# ------------- Main -------------------
portnumber=59154
ip = "192.168.222.1"
#ip = "192.168.0.110"
server_addr =(ip, portnumber)
serversock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
serversock.bind(server_addr)
time.sleep(3.1) # 3.1秒待機 ([UMEHOSHI ITA]の初期を待つため)
thread_id = _thread.start_new_thread(input_loop, ()) # 入力用スレッド起動
serversock.listen(1) # TCPサーバ受け入れ待機
while flag_listen_loop:
#
sock2, address = serversock.accept() # クライアントの接続許可
serversock.close()
tcp_send_message(sock2, "\nConnect!") # TCPクライアントへのメッセージ
try:
receiveData( sock2 ) # 受信応答処理のループ
except: pass
print(cmd) # ― ― ― ― の音で終了処理
sock2.close()
上記コードの補足:
ファイル受信関数が、「recieve_file_Max」と「recieve_file」の2つあります。#include#include "common.h" // RAMで動かす場合の絶対アドレス範囲は、(0x80005000~0x80008000)です。 __attribute__((address( 0x80007F00 ))) void test_main (void); void test_main(){ _clear_beep_code();// 以前の音の登録情報を消去 _UM_PTR_GOTO_BEEP=_UM_PTR_BEEP_AREA; // ループ音に設定 _debug_hex4(1,0x0F,1);//― ― ― ― }
import setap import server