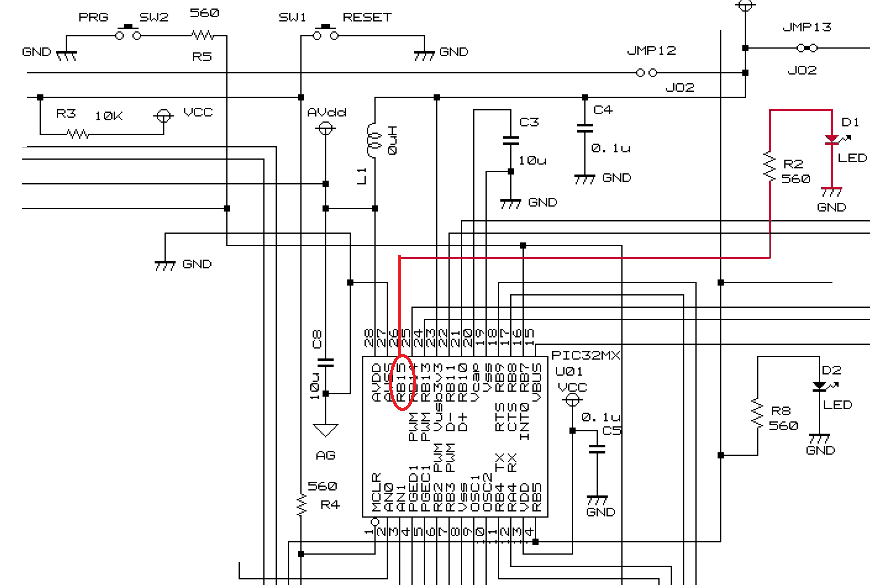
偙偺RB15偺弌椡抂巕偑Low偱徚偊丄Hi偵偡傟偽LED偵揹棳偑棳傟偰揰摂偟傑偡丅
 |
 |
丂UMEHOSHI ITA偺婲摦帪偺弶婜壔偺奣梫傪壓婰偵帵偟傑偡丅
if( 僷儚乕僆儞儕僙僢僩偐丠 ){// my_sys.c偺init_handle_area娭悢撪
儅僋儘梡偺娭悢傊偺億僀儞僞側偳奺庬曄悢偺弶婜壔傗_HANDLES攝楍偺弶婜壔傪峴偆丅
乽僂儊丒僄僨傿僢僩僾儘僌儔儉乿偱巊傢傟傞儅僋儘娭悢偑搊榐偝傟傞丅偦偟偰丄
_HANDLES[_IDX_HANDLE_USER_SET_FUNC] = dummy_init_function;丂丂偺娭悢偑搊榐偝傟傞丅
乮忋婰娭悢傊偺億僀儞僞偼丄_handle_user_set_func()偺儅僋儘偺娭悢偱幚峴偱偒傞乯
_HANDLES[_IDX_INIT_SUB_FUNC] = dummy_init_function;丂丂偺娭悢偑搊榐偝傟傞丅
乮忋婰娭悢傊偺億僀儞僞偼丄_init_sub_func()偺儅僋儘偺娭悢偱幚峴偱偒傞乯
power_on_flag = 1;
}
_handle_user_set_func(); // init_handle_area娭悢撪偺婲摦儅僋儘娭悢屇傃弌偟乮偙偙偱丄_HANDLES偺梫慺偺曄峏側偳傪峴偆乯
SYS_Initialize ( NULL );// 偙偙偱USB傗巜掕IO偺弶婜壔偑峴傢傟傞乮 manin.c傛傝乯
_init_sub_func(); // init_interrupt娭悢撪偺婲摦帪儅僋儘娭悢屇傃弌偟乮乽僂儊丒僄僨傿僢僩僾儘僌儔儉乿偺婲摦娭悢乯
偙偺屻偱丄亀USB庴怣暥帤楍張棟梡偺儖乕僾亁偵恑傒傑偡丅
忋婰傛傝丄僷儚乕僆儞帪偵儅僋儘娭悢梡攝楍偺_HANDLES[婡擻幆暿揧偊帤] 孮偵娭悢傪婰壇偟偰偄傑偡丅
偙偙偱_HANDLES[_IDX_HANDLE_USER_SET_FUNC] 傗丄
_HANDLES[_IDX_INIT_SUB_FUNC]偵壗傕偟側偄dummy_init_func娭悢偑婰壇偟偰偄傑偡丅
偦傟偑儕僙僢僩帪偵_handle_user_set_func()丄
_handle_user_set_func()偺儅僋儘屇傃弌偟偱幚峴偝傟傑偡丅
儕僙僢僩偱幚峴僾儘僌儔儉偼丄偙偺偳偪傜偐傑偨偼椉曽傪巊偄傑偡丅
USB傗巜掕IO偺弶婜壔慜偵峴傢偣傞娭悢偱偁傟偽丄_HANDLES[_IDX_HANDLE_USER_SET_FUNC]偵搊榐偟丄
丂弶婜壔屻偵峴傢偣傞娭悢偱偁傟偽丄_HANDLES[_IDX_HANDLE_USER_SET_FUNC]偵搊榐偟傑偡丅
偙偺搊榐傪乽婓朷偡傞婲摦娭悢乿偵愝掕偟捈偣偽丄
揹尮傪愗傞傑偱儕僙僢僩儃僞儞偱乽婓朷偡傞婲摦娭悢乿傪幚峴偝偣傞偙偲偑偱偒傑偡丅
埲壓偱偼偙偺巇慻傒傪棙梡偟偰丄D1偺LED偱偺乽 L僠僇 乿柍尷儖乕僾偺娭悢傪丄
_HANDLES[_IDX_INIT_SUB_FUNC] 偵搊榐偟偰偄傑偡丅
偙傟偱偙偺搊榐娭悢偼丄揹尮搳擖屻丄儕僙僢僩儃僞儞偺憖嶌偱摦嶌偡傞偙偲偵側傝傑偡丅
壓婰C尵岅僜乕僗偼丄乽umehoshiEdit乿僣乕儖偱丄價儖僪幚峴偱偒傑偡丅
塃儕僗僩偼媡傾僙儞僽儖偟偨僐乕僪偱丄偙傟傪嶲峫偵丄屻弎偺傾僙儞僽儕儕僗僩傪嶌偭偰偄傑偡丅
#include <xc.h> // test.c
#include "common.h"
// RAM偱摦偐偡応崌偺愨懳傾僪儗僗斖埻偼丄乮0x80005000乣0x80008000乯偱偡
__attribute__((address( 0x80005000 ))) void start_boot (void);
void start_boot(){
extern void start_main();
_HANDLES[_IDX_INIT_SUB_FUNC] = start_main;//婲摦帪偵摦嶌偡傞娭悢偵丄壓婰start_main傪搊榐
}
//
|
80005000 <start_boot>: 80005000: 27bdfff8 addiu sp,sp,-8 80005004: afbe0004 sw s8,4(sp) 80005008: 03a0f021 move s8,sp 8000500c: 3c02a000 lui v0,0xa000 80005010: 344240c8 ori v0,v0,0x40c8 80005014: 3c038000 lui v1,0x8000 80005018: 24635070 addiu v1,v1,0x5070 8000501c: ac430000 sw v1,0(v0) 80005020: 03c0e821 move sp,s8 80005024: 8fbe0004 lw s8,4(sp) 80005028: 27bd0008 addiu sp,sp,8 8000502c: 03e00008 jr ra 80005030: 00000000 nop 80005034 <wait>: 80005034: 27bdfff8 addiu sp,sp,-8 80005038: afbe0004 sw s8,4(sp) 8000503c: 03a0f021 move s8,sp 80005040: afc40008 sw a0,8(s8) 80005044: 00000000 nop 80005048: 8fc20008 lw v0,8(s8) 8000504c: 2443ffff addiu v1,v0,-1 80005050: afc30008 sw v1,8(s8) 80005054: 1440fffc bnez v0,80005048 <wait+0x14> 80005058: 00000000 nop 8000505c: 03c0e821 move sp,s8 80005060: 8fbe0004 lw s8,4(sp) 80005064: 27bd0008 addiu sp,sp,8 80005068: 03e00008 jr ra 8000506c: 00000000 nop 80005070 <start_main>: 80005070: 27bdffe8 addiu sp,sp,-24 80005074: afbf0014 sw ra,20(sp) 80005078: afbe0010 sw s8,16(sp) 8000507c: 03a0f021 move s8,sp 80005080: 00000000 nop 80005084: 3c02bf88 lui v0,0xbf88 80005088: 34038000 li v1,0x8000 8000508c: ac436128 sw v1,0x6128(v0) 80005090: 00000000 nop 80005094: 0c00140d jal 80005034 <wait> 80005098: 3c04003f lui a0,0x3f 8000509c: 3c02bf88 lui v0,0xbf88 800050a0: 34038000 li v1,0x8000 800050a4: ac436124 sw v1,0x6124(v0) 800050a8: 00000000 nop 800050ac: 0c00140d jal 80005034 <wait> 800050b0: 3c04003f lui a0,0x3f 800050b4: 08001421 j 80005084 <start_main+0x14> 800050b8: 00000000 nop |
丂
埲壓偵丄忋婰偺幚嵺偵摦嶌偟偨丄傾僙儞僽儕儕僗僩傪帵偟傑偡丅忋偺C尵岅偺媡傾僙儞僽儖儕僗僩傪僐乕僪偵偟偰傒傑偟偨丅
柍尷儖乕僾側偺偱丄杮棃偁傞傋偒儐乕僓乕僾儘僌儔儉偺儕僞乕儞張棟偑偁傝傑偣傫丅乮僐儊儞僩傾僂僩偟偰偄傑偡丅乯
丂丂忋婰偱曇廤偟偨傾僙儞僽儕僜乕僗傪丄嵍偺儃僞儞偱乽傾僢僙儞僽儖乿偱偒傑偡丅
斣抧偐傜幚峴偡傞UME愱梡Hex僐儅儞僪傪丄 嵟屻偵捛壛杽傔崬傒偡傞応崌偵僠僃僢僋偡傞亖亖亜
慜夞偺婰弎偱偼僗僞僢僋偺儘乕僇儖曄悢傪巊偭偰偄傑偟偨偑丄壜擻側尷傝s0-s7偺儗僕僗僞傪巊偆傛偆偵曄峏偟傑偟偨丅
乮auto曄悢傪巊偆応崌偱傕丄fp偺僼儗乕儉億僀儞僞傪巊傢傢側偄偱捈愙偵僗僞僢僋憖嶌傪偡傞庤朄偵偟傑偡丅乯
偦傟偱丄wait僒僽儖乕僠儞偱僇僂儞僩僟僂儞偵巊偭偰偄傞曄悢傪丄s7偺儗僕僗僞傪巊偆傛偆偵曄峏偟傑偟偨丅
傑偨丄偙偺嶌昳偺傛偆側柍尷儖乕僾偱偁傟偽丄栠傞昁梫偑側偄偺偱栠傝抣偺妋曐偼僐儊儞僩壔偟傑偟偨丅
01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 |
#include <xc.h> // test.S 乮L僠僇偺柍尷儖乕僾乯 .set noreorder #傾僙儞僽儔偵柦椷偺弴彉傪帺摦曄峏偝偣側偄丅 .section start_boot,address(0x80005000),code .ent start_boot start_boot: ADDIU sp,sp,-8 LUI v0,0xa000 # 埲壓2峴偱丄_HANDLES[_IDX_INIT_SUB_FUNC]梫慺偺傾僪儗僗偺0xa00040c8傪v0偵愝掕 ORI v0,v0,0x40c8 # 0xA0004000+50*4=0xa00040c8 偺壓埵16bit LUI v1,%hi(start_main) ADDIU v1,v1,%lo(start_main) # v1偺start_main娭悢偺傾僪儗僗傪愝掕 SW v1,0(v0) # *v0 = v1 偱乽_HANDLES[_IDX_INIT_SUB_FUNC] = start_main;乿傪幚尰 ADDIU sp,sp,8 JR ra NOP start_main: .L4: LUI v0,0xbf88 # 埲壓偺俁峴偱丄0xbf886128偺PORTBSET偵0x8000傪愝掕偡傞偙偲偱丄D1偺LED傪揰摂 li v1,0x8000 SW v1,0x6128(v0) # 埲忋偺俁峴偱1偺LED傪揰摂 NOP JAL wait # 僠儑僢僩懸偮wait娭悢屇傃弌偟(師峴偺Ra偵栠傝斣抧傪婰壇偟偰僕儍儞僾) LUI a0,0x3f NOP LUI v0,0xbf88 # 埲壓偺俁峴偱丄0xbf886124偺PORTBCLR偵0x8000傪愝掕偡傞偙偲偱丄D1偺LED傪徚摂 li v1,0x8000 SW v1,0x6124(v0) # 埲忋偺俁峴偱1偺LED傪徚摂 JAL wait # 僠儑僢僩懸偮wait娭悢屇傃弌偟(師峴偺Ra偵栠傝斣抧傪婰壇偟偰僕儍儞僾) LUI a0,0x3f J .L4 # 柍尷儖乕僾偺僕儍儞僾 NOP .end test_main wait: ADDIU sp,sp,-8 # 埲壓偱巊偆24byte傑偱偺戅旔僒僀僗傪僗僞僢僋偵嶌傞丅亙亖亖亖亖wait娭悢 SW ra,4(sp) # 尰嵼偺娭悢偺栠傝斣抧傪僗僞僢僋偵戅旔 ADDU s7, a0, zero # 堷悢儗僕僗僞a0傪丄s7偵婰壇 Lwait1: ADDIU s7, s7,-1 # s7=s7+(-1) BNE s7, zero, Lwait1 NOP ADDIU sp,sp,8 # 娭悢幚峴慜偺僗僞僢僋億僀儞僞偵栠偡 JR ra NOP |
忋婰僐乕僪傪丄Python偱[UMEHOSHI ITA]婎斅偱揮憲偟偰幚峴偡傞庤弴偺徯夘
梊傔丄python偑摦嶌偡傞僞乕儈僫儖(僐儅儞僪僾儘儞僾僩)傪丄奐偄偰弨旛偟偰抲偔偲傛偄偱偟傚偆丅
埲壓偱偼丄R:\work傪嶌嬈埵抲乮僇儗儞僩僨傿儗僋僩儕乯偵偟偰愢柧偟偰偄傑偡丅
傑偨丄python僾儘僌儔儉偱偼丄serial儌僕儏乕儖傪捛壛偟偰偍偔昁梫偑偁傝傑偡丅
乽pip show serial乿偺僐儅儞僪憖嶌偱丄僀儞僗僩乕儖偝傟偰偄傞偐妋擣偱偒傑偡丅
僀儞僗僩乕儖偝傟偰偄側偄応崌偼丄乽pip install pyserial乿偺憖嶌偱丄僀儞僗僩乕儖偟偰偍偔偲椙偄偱偟傚偆丅
亂1亃 [UMEHOSHI ITA]婎斅偱揮憲偡傞僥僉僗僩僼傽僀儖乽command.txt乿傪梡堄偟傑偡丅
忋婰偺乽傾僙儞僽儔曇廤晹乿偺捈壓偵偁傞乽傾僙儞僽儖乿儃僞儞傪僋儕僢僋偟傑偡丅
乮偙偺儃僞儞塃壓偺丄巜掕傾僪儗僗偐傜幚峴偝偣傞僐乕僪杽傔崬傒梡偺僠僃僢僋儃僢僋僗偑僠僃僢僋偝傟偰偄傞偙偲妋擣偟偰峴偆乯
乽傾僙儞僽儔曇廤晹乿偺僜乕僗偵僄儔乕偑柍偗傟偽丄[UME愱梡Hex僐儅儞僪]偺僥僉僗僩偑丄偦偺壓偺 TextArea 偵昞帵偝傟傑偡丅
乮僄儔乕偑偁傟偽丄僄儔乕偑柍偔HEX僐乕僪偑惗惉偝傟傞傑偱丄乽傾僙儞僽儔曇廤晹乿偺廋惓偲傾僙儞僽儖乿傪孞傝曉偟傑偡乯
儊儌挔側偳偱丄乽command.txt乿偺僼傽僀儖傪惗惉偟偰奐偒丄
忋婰憖嶌偱摼傜傟偨TextArea偺[UME愱梡Hex僐儅儞僪]偺僥僉僗僩傪丄 僐僺乕(CTRL+A CTRL+C)憖嶌偟丄
丂丂偦傟傪乽command.txt乿曇廤夋柺偱揬傝晅偗乮(CTRL+V乯偟偰丄曐懚偟傑偡丅
曐懚埵抲偼丄python偑摦嶌偡傞僞乕儈僫儖偺嶌嬈埵抲乮僇儗儞僩僨傿儗僋僩儕乯偱偡丅(屻弎椺偱偼丄R:\work偱帵偟偰偄傑偡乯
亂2亃 [UMEHOSHI ITA]婎斅傊[command.txt乿傪揮憲偡傞python僼傽僀儖傪梡堄偟傑偡丅
乽instruct.py乿偺柤慜偺僜乕僗僼傽僀儖傪丄[command.txt乿偲摨偠埵抲偵嶌傝傑偡丅乮堦搙嶌傟偽丄師夞偼巊偆偩偗偱丄嶌傞昁梫偼偁傝傑偣傫丅(CTRL+A CTRL+C)憖嶌偱丄僐僺乕壜擻乯
亂3亃 [UMEHOSHI ITA]婎斅傊[command.txt乿傪揮憲偟偰幚峴偝偣傞丅
忋婰偱嶌偭偨乽instruct.py乿偲[command.txt乿偑懚嵼偡傞埵抲偱丄
python偑摦嶌偡傞僞乕儈僫儖(僐儅儞僪僾儘儞僾僩)傪奐偒傑偡丅
埲壓偱偼丄偙偺嶌嬈埵抲乮僇儗儞僩僨傿儗僋僩儕乯偑丄R:\work偱偁傞応崌偺椺偱愢柧偟偰偄傑偡丅
傑偢 [UMEHOSHI ITA]婎斅偲丄PC傪USB偱愙懕偟傑偡丅
師偵僞乕儈僫儖僾儘儞僾僩傪亀powershell亁偵偟偰丄
亀Get-CimInstance Win32_PnPEntity | Where-Object {$_ -like "*(COM*"} | Select-Object Caption亁
偺僐儅儞僪憖嶌偱丄USB偺僔儕傾儖 僨僶僀僗偺COM斣崋傪挷傋傑偡丅
R:\work>powershell
Windows PowerShell
Copyright (C) Microsoft Corporation. All rights reserved.
怴偟偄僋儘僗僾儔僢僩僼僅乕儉偺 PowerShell 傪偍帋偟偔偩偝偄 https://aka.ms/pscore6
PS R:\work> Get-CimInstance Win32_PnPEntity | Where-Object {$_ -like "*(COM*"} | Select-Object Caption
Caption
-------
Bluetooth 儕儞僋宱桼偺昗弨僔儕傾儖 (COM10)
USB 僔儕傾儖 僨僶僀僗 (COM4)
Bluetooth 儕儞僋宱桼偺昗弨僔儕傾儖 (COM11)
PS R:\work>
偙偺幚峴椺偐傜丄USB 僔儕傾儖 僨僶僀僗 偑COM4偑巊偊傞忬懺偵側偭偰偄傞偙偲偑暘偐傝傑偡丅
乮偙偺儕儞僋儁乕僕偱帵偡傛偆偵丄僨僶僀僗儅僱乕僕儍偱妋擣偡傞偙偲傕偱偒傑偡乯
偙偺斣崋偺4傪婰壇偟偰師偺揮憲僾儘僌儔儉幚峴偵恑傓偺偱偡偑丄
偦偺USB 僔儕傾儖 僨僶僀僗 偑尒偮偐傜側偄応崌丄師偺揰偑峫偊傜傟傑偡丅
- 惓偟偔[UMEHOSHI ITA]婎斅偑USB偱愙懕偝傟偰偄側偄丅
- USB偺CDC僪儔僀僶偑Windows偱巊偊傞忬懺偵側偭偰偄側偄丅
丂丂丂乮Microchip幮 USB CDC梡 Driver偑帺摦揑偵僀儞僗僩乕儖偝傟傞偼偢偱偡偑丄偦傟偑摥偄偰偄側偄側偳 乯 - [UMEHOSHI ITA]婎斅偱丄婛偵USB傪夘偝側偄僾儘僌儔儉偑摦偄偰偄傞丅
丂丂乮偙偺応崌丄揹尮傪擖傟捈偡乮傑偨偼SW1偲SW2傪墴偟偰丄SW1傪棧偟偰偐傜2昩埲撪偱SW2傪棧偡憖嶌乯弶婜壔偱丄USB捠怣偑壜擻偲側傝傑偡乯
懕偄偰丄埲壓偺亀python command.txt亁偺憖嶌偱丄揮憲幚峴僾儘僌儔儉乮忋婰偺傾僙儞僽儔梡偺椺乯傪幚峴偟傑偡丅
幚峴椺丂乮嵟弶偵忋婰偱摼傜傟偨斣崋偺4傪僉乕擖椡偟偰偄傑偡丅乯
R:\>python instruct.py USB 僔儕傾儖 僨僶僀僗偱丄巊梡偡傞COM偺斣崋傪擖椡亜亜4 S108000500000F8FFBD2700A0023CC84042340080033C 70僠僃僢僋僒儉丗 0 USB庴怣仠 b'S108000500000F8FFBD2700A0023CC84042340080033C70\r\n' USB庴怣仠 b'SET:80005000\r\n' S10800050100024506324000043AC0800BD270800E003 C2僠僃僢僋僒儉丗 0 USB庴怣仠 b'S10800050100024506324000043AC0800BD270800E003C2\r\n' USB庴怣仠 b'SET:80005010\r\n' S1080005020000000000088BF023C00800324286143AC C0僠僃僢僋僒儉丗 0 USB庴怣仠 b'S1080005020000000000088BF023C00800324286143ACC0\r\n' USB庴怣仠 b'SET:80005020\r\n' S108000503000000000001714000C3F00043C00000000 09僠僃僢僋僒儉丗 0 USB庴怣仠 b'S108000503000000000001714000C3F00043C0000000009\r\n' USB庴怣仠 b'SET:80005030\r\n' S10800050400088BF023C00800324246143AC1714000C A2僠僃僢僋僒儉丗 0 USB庴怣仠 b'S10800050400088BF023C00800324246143AC1714000CA2\r\n' USB庴怣仠 b'SET:80005040\r\n' S1080005050003F00043C0914000800000000F8FFBD27 98僠僃僢僋僒儉丗 0 USB庴怣仠 b'S1080005050003F00043C0914000800000000F8FFBD2798\r\n' USB庴怣仠 b'SET:80005050\r\n' S1080005060000400BFAF21B88000FFFFF726FEFFE016 F1僠僃僢僋僒儉丗 0 USB庴怣仠 b'S1080005060000400BFAF21B88000FFFFF726FEFFE016F1\r\n' USB庴怣仠 b'SET:80005060\r\n' S108000507000000000000800BD270800E00300000000 01僠僃僢僋僒儉丗 0 USB庴怣仠 b'S108000507000000000000800BD270800E0030000000001\r\n' USB庴怣仠 b'SET:80005070\r\n' R008000500000 61僠僃僢僋僒儉丗 0 幚峴僗僞乕僩偺 Enter >> USB庴怣仠 b'R00800050000061\r\n' USB庴怣仠 b'START:80005000\r\n' 廔椆妋擣偺 Enter >>> R:\>
[command.txt乿偺拞偵"R008000500000"偺傛偆側幚峴僐儅儞僪偑懚嵼偡傞偲丄幚峴僗僞乕僩偺 Enter >>偺
僾儘儞僾僩偑弌偰丄堦帪掆巭偟傑偡丅
忋婰椺偱偼丄偦偙偱ENTER僉乕傪擖椡偡傞偙偲偱丄"R00800050000061"偑憲傜傟丄UMEHOSHI ITA婎斅偱乽0x80005000乿斣抧偐傜幚峴偟傑偡偑丄
傑偩乽 L僠僇 乿偼幚峴偟傑偣傫丅
幚峴偡傞偺偼
_HANDLES[_IDX_INIT_SUB_FUNC] = start_main憡摉偺搊榐張棟偱偡丅
偙偺搊榐偺幚峴偺屻偱丄儕僙僢僩儃僞儞傪墴偡偲丄搊榐娭悢幚峴偱乽 L僠僇 乿偑巒傑傝傑偡丅
儕僙僢僩儃僞儞偺憖嶌偵娭學側偔丄幚峴傾僪儗僗傪巜掕偟偨僗僞乕僩梡偺僐儅儞僪暥帤楍乮"R00乣"乯傪憲傞偙偺偱 婲摦偝偣傞僾儘僌儔儉偺嶌傝曽偼偙偪傜偱帵偡儁乕僕偱帵偟傑偡丅