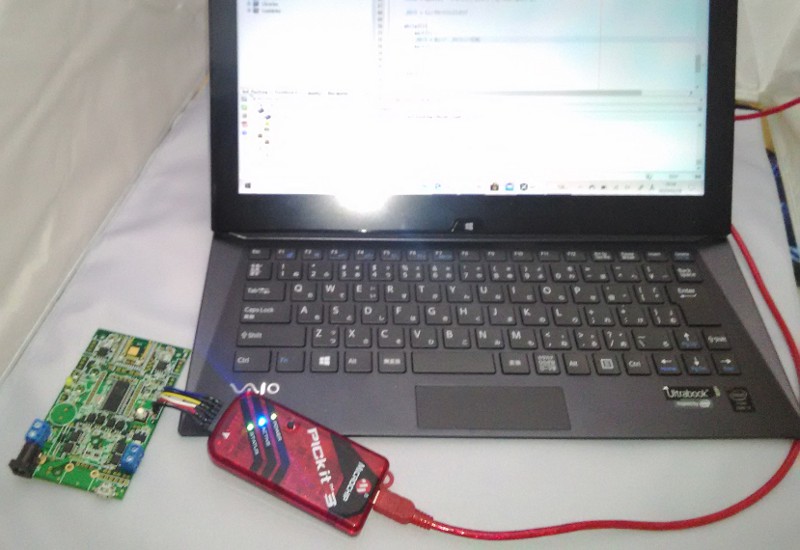
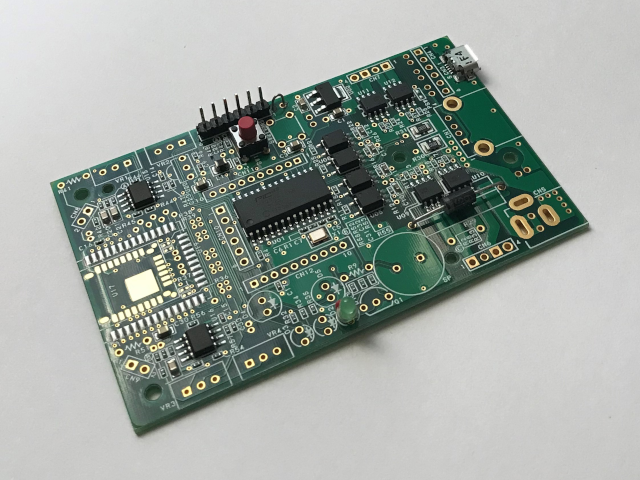
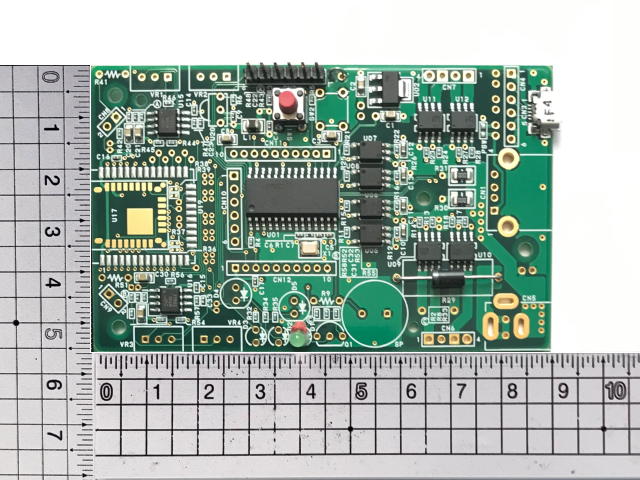
ほば名刺サイズ(92mm×56mm)の汎用的な制御基板で、microchip社のマイクロコントローラ (
PIC32MX270F256B-50I/SP)を使っています。
PCなどとUSBで接続して、短いプログラミングが可能になっています。
(組み込みプログラムの一部を、比較的簡単に入れ替えてプログラミングすることが可能です。)
画像クリックで画像の大きさが変わります。
2つのアナログ入力と、 モータ制御などに使える2つの 絶縁型PWM出力を持ち、
入力したデータを判断して、出力を制御するような使い方を想定しています。
「趣味でもの作りをする人」に使って欲しいという目標で、アイデアに応じて使いたい部品を、
ご自身で選んで追加できるようにしました。
例えば、各種コネクタ、コンデンサマイク、可変抵抗、LED、タクトスイッチ、圧電スピーカ、赤外線リモコン送受信部品などは未実装で、
必要に応じて利用者ご自身で部品を選択し、半田付けで追加する形式になっております。
趣味以外にも、学習・教材用、ロボット用、アイデア商品検討用・・とさまざまな作品に、
組み込む部品として使っていただきたく、願っています。
UMEHOSHI ITA 基板は、USB-CDC(Universal Serial Bus Communications Device Class)のCOM ポートを介してプログラミングして、制御することができます。
(USBを介してプログラム転送で動作させる使い方はArduinoに似ています。
ですが使っているコントローラはAVRでなく、 Microchip社のPIC32MXを使っており、
Arduinoとは違うコンセプトで作ったものです。)
基板「UMEHOSHI ITA」は、「micro B」のUSBのメスコネクタを持っており、これで電源供給を行い、通信が可能です。
そして現在、WindowsPCや HOST機能のUSB端子を持つAndoroid機器で、接続用プログラムを用意しています。
また、Rasberry PiのPythonと通信する例を紹介しています。
(appleのPCやスマフォ、またはLinuxなども、プログラムさえ自作などして用意できれば繋げられるでしょう)
下記のイメージ例でUSBコネクタケーブルを使って接続します。
 | WindowsPCなど
(USB type-Aを持つ) |
 | Andoroidなど
(USBのHOST機能を持つ) |
上記例の接続イメージの相手は、「USB-TypeA」 や 「micro B」をコネクタを持つPCやAndoroid機器ですが、
接続先の相手機器のコネクタが「USB-TypeC」でも対応ケーブルを用意できれば可能です。
近年は、「micro B⇔TypeA」のUSB充電とデータ通信が可能なケーブルが比較的容易に入手できます。
ケーブルの長さは用途に応じて選んでください。(100円ショップのものでも構いませんが、充電専用ケーブルはダメ。)
プログラミング用にWindowsPCと接続するケーブルは、比較的長い方が使いやすいでしょう。
また接続先ホストに応じて、「type-A」から「micro B」や「TypeC」への変換コネクタを介すことも可能です。
ケーブル例と「micro B」コネクタ、「type-A」コネクタ、変換コネクタを下記に示します。
| micro-B と Type-A のケーブル例 |
type-AコネクタをPCやスマフォに合わせて変換コネクタが使えます。 |
| micro Bコネクタ | ケーブル | type-Aコネクタ | micro Bへの変換コネクタ | type-Cへの変換コネクタ |
 |
 |
 |
 |
 |
「TypeAメス-->micro B変換コネクタ」を使う場合は、PCやスマフォ側で使ってください。
変換アダプタを[UMEHOSHI ITA]側で使うと動作しない場合が多いようです。
(対応しない通信用のUSBホストケーブルや変換コネクタもあるようです。ホスト側から電源供給されないと動作しません)
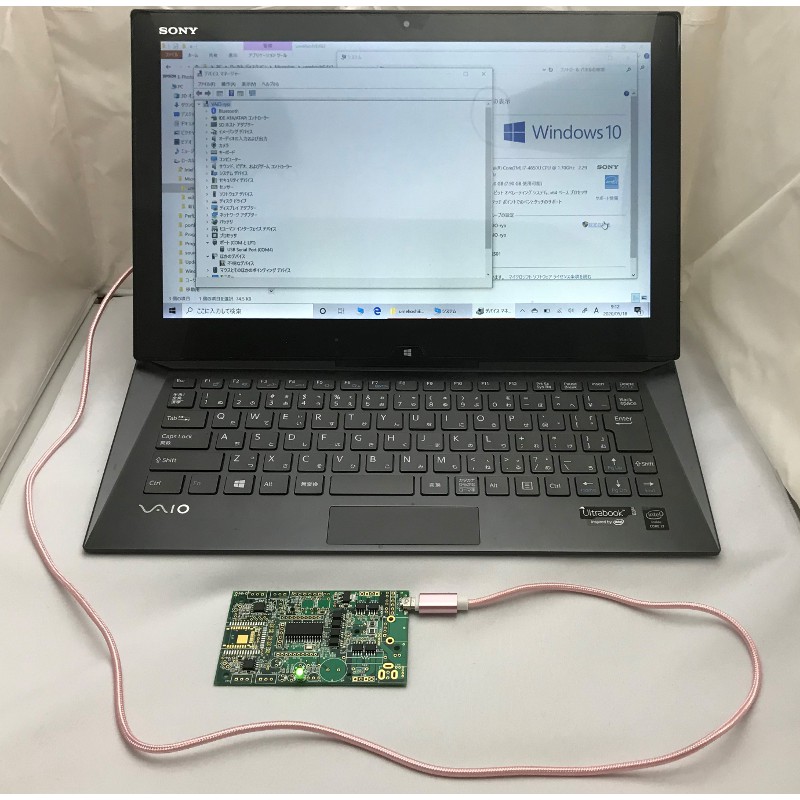
Windows PCと接続
あらかじめ、前述で示した対応の接続ケーブルを用意します。
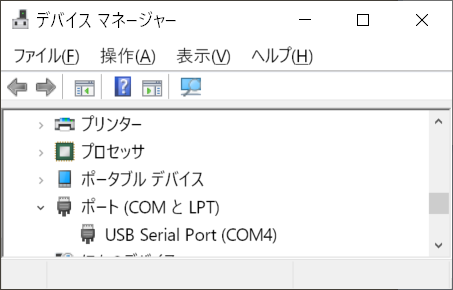
Windows10のタスクバー端のSTARTアイコンの右クリックメニューから「デバイス マネージャー」選択して表示しておきます。
USB装備PCと[UMEHOSHI ITA]の基板を、用意したUSBケーブルで接続します。
ここで、「デバイス マネージャー」表示内の「ポート(COMとLPT)」に新たな「通信ポート(COMn)」が出現すればOKです。
以下は、「USB Serial Port(COM4)」が接続で出現した場合の例 です。
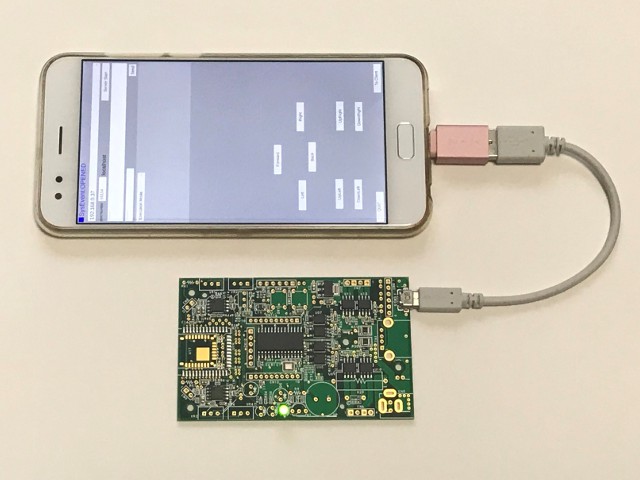
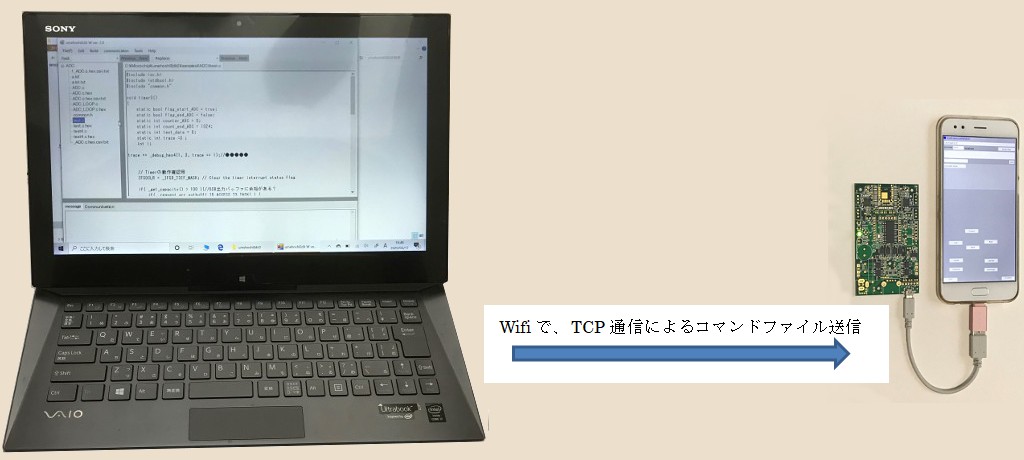
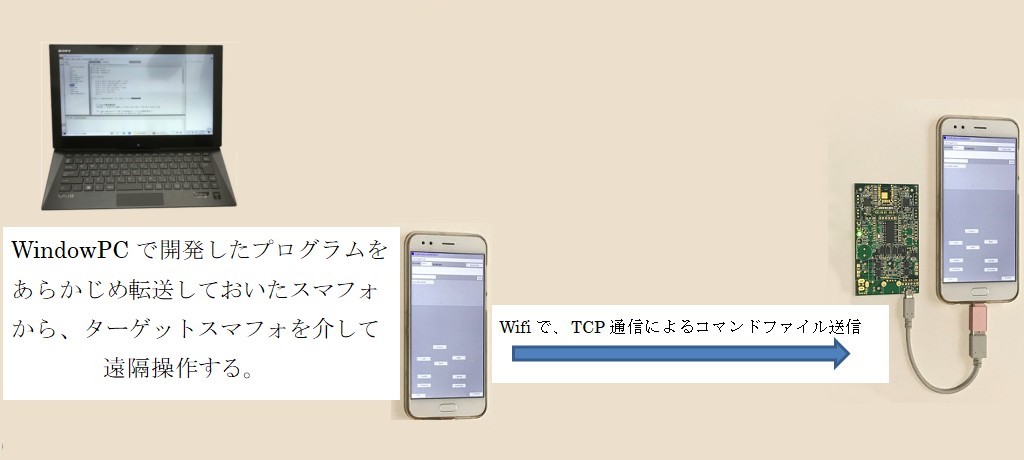
Androidと接続
あらかじめ、前述で示した対応の接続ケーブルを用意します。
将来的にGoogle Playよりインストールできるようにする予定ですが、
現在は、
umehoshiアプリを
このページから「umehoshiアプリ」をダウインロードしてインストールします。
USB装備AndroidとUMEHOSHI基板を用意したケーブルで接続します。
この時点で、[UMEHOSHI ITA]のD1のLEDが点灯します。(点灯しない場合、このケーブル接続で失敗しています)
その後、インストールした「umehoshiアプリ」を起動し、右上端のメニューより「Setting USB」を選択して、「CONNECT」をタッチします。
この操作で、アプリ上部に「SysEvent:OPENED」の表示が出現すれば、OKです。