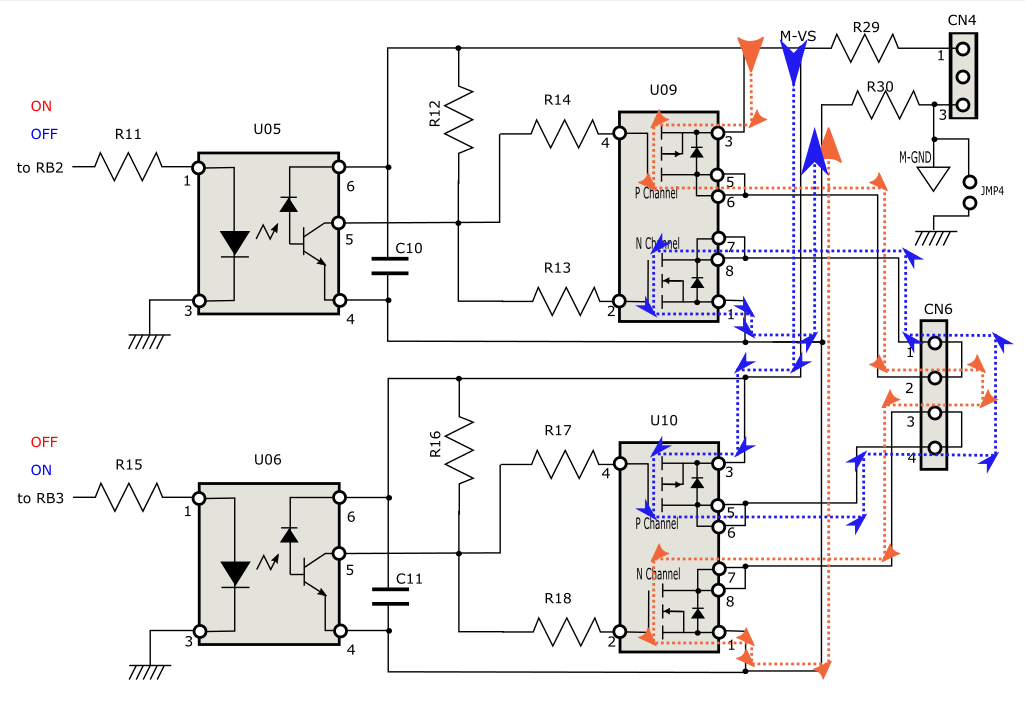
埲壓偵CN6偺惂屼偵拲栚偟偨H僽儕僢僕惂屼夞楬恾傪帵偟傑偡丅乮CN7偺惂屼傕摨摍偺庤朄偱峴傢傟偡丅乯
 |
 |
忋婰夞楬恾偱丄RB2偑1偱偲RB3偑0偁傞応崌丅僼僅僩僇僾儔U05偑ON偱U06偑OFF偺帪丄愒偺攋慄偱帵偡傛偆偵揹棳偑棳傟傑偡丅
乮曋媂忋丄忋婰傪惓揮偲偡傞偲丄壓婰偼媡揮偲偟傑偡丅乯
忋婰夞楬恾偱丄RB2偑0偱偲RB3偑1偁傞応崌丅僼僅僩僇僾儔U05偑OFF偱U06偑OO偺帪丄惵偺攋慄偱帵偡傛偆偵揹棳偑棳傟傑偡丅
埲壓偺僐乕僪偱偼丄CN6抂巕傪丄儕僙僢僩偛偲偵仺惓揮仺媡揮仺掆巭偲愗傝懼偊傞僐乕僪偱偡丅
偙偺惂屼偼丄僌儘乕僶儖曄悢 cn6傪仺1仺2仺0偲愗傝懼偊偰丄偦偺忣曬偱CN6傪惂屼偟傑偡丅丅
傑偨丄偙傟傪棙梡偟偰LED傕cn6傪仺D1:OFF,D2:ON丂仺D1:ON,D2:OFF丂仺D1:OFF,D2:OFF偲愗傝懼偊傑偡丅
乮壓婰C尵岅僜乕僗偼丄乽umehoshiEdit乿僣乕儖偱丄價儖僪幚峴偱偒傑偡丅
塃僜乕僗偼媡傾僙儞僽儖偟偨僐乕僪偱丄偙傟傪嶲峫偵丄屻弎偺傾僙儞僽儕僜乕僗傪嶌偭偰偄傑偡丅乯
#include <xc.h>// cn6_mortor_rom.c
#include "common.h"
#define CN6B02 0x0004 //CN6偺PORTBbits.RB2惂屼梡bit
#define CN6B03 0x0008 //CN6偺PORTBbits.RB2惂屼梡bit
#define D1LED 0x8000 // RB7
#define D2LED 0x0020 // RB5
int cn6 = 0;// 0仺1仺2仺0仺1仺2丒丒丒
__attribute__((address( 0x80005000 ))) void set_boot(void);
void set_boot(){// 堦夞偩偗幚峴偡傞偙偲偱丄ROM(0x9D03fff0)偵搊榐
extern void start_boot();
// 僷儚乕僆儞偺応崌偩偗丄幚峴偡傞娭悢start_boot偺搊榐
_nvm_write_word(0x9D03fff0,(uint32_t)start_boot);
}
// ROM椞椞堟抲偼丄埲壓偺傛偆偵愨懳傾僪儗僗傪巜掕偟側偗傟偽側傜側偄丅
__attribute__((address( 0x9D020300 ))) void start_boot(void);
void start_boot(){// 僷儚乕ON僆儞偱幚峴偡傞娭悢掕媊
cn6 = 0;
PORTBCLR = CN6B02 | CN6B03 | D1LED | D2LED;
}
// ROM椞椞堟偱丄僷儚乕ON傪敽傢側偄Reset偱婲摦偡傞愨懳斣抧( 0x9D020000 )
__attribute__((address( 0x9D020000 ))) void start_main (void);
void start_main()
{
cn6++;
if(cn6 == 1){ // 惓揮偲丄D1傪0丄D2傪1
PORTBCLR = CN6B03 | D1LED;
PORTBSET = CN6B02 | D2LED;
} else if(cn6 == 2){ // 媡揮偲丄D1傪1丄D2傪0
PORTBCLR = CN6B02 | D2LED;
PORTBSET = CN6B03 | D1LED;
} else {
cn6 = 0;
PORTBCLR = CN6B02 | CN6B03 | D1LED | D2LED;// 慡偰OFF
}
}
|
80005000 <set_boot>: 80005000: 27bdffe8 addiu sp,sp,-24 80005004: afbf0014 sw ra,20(sp) 80005008: afbe0010 sw s8,16(sp) 8000500c: 03a0f021 move s8,sp 80005010: 3c02a000 lui v0,0xa000 80005014: 344240f4 ori v0,v0,0x40f4 80005018: 8c420000 lw v0,0(v0) 8000501c: 3c039d02 lui v1,0x9d02 80005020: 24630300 addiu v1,v1,768 80005024: 3c049d03 lui a0,0x9d03 80005028: 3484fff0 ori a0,a0,0xfff0 8000502c: 00602821 move a1,v1 80005030: 0040f809 jalr v0 80005034: 00000000 nop 80005038: 03c0e821 move sp,s8 8000503c: 8fbf0014 lw ra,20(sp) 80005040: 8fbe0010 lw s8,16(sp) 80005044: 27bd0018 addiu sp,sp,24 80005048: 03e00008 jr ra 8000504c: 00000000 nop 80008000 <cn6>: 80008000: 00000000 nop 9d020000 <start_main>: 9d020000: 27bdfff8 addiu sp,sp,-8 9d020004: afbe0004 sw s8,4(sp) 9d020008: 03a0f021 move s8,sp 9d02000c: 3c028001 lui v0,0x8001 9d020010: 8c428000 lw v0,-32768(v0) 9d020014: 24430001 addiu v1,v0,1 9d020018: 3c028001 lui v0,0x8001 9d02001c: ac438000 sw v1,-32768(v0) 9d020020: 3c028001 lui v0,0x8001 9d020024: 8c438000 lw v1,-32768(v0) 9d020028: 24020001 li v0,1 9d02002c: 14620009 bne v1,v0,9d020054 <start_main+0x54> 9d020030: 00000000 nop 9d020034: 3c02bf88 lui v0,0xbf88 9d020038: 34038008 li v1,0x8008 9d02003c: ac436124 sw v1,24868(v0) 9d020040: 3c02bf88 lui v0,0xbf88 9d020044: 24030024 li v1,36 9d020048: ac436128 sw v1,24872(v0) 9d02004c: 0b408027 j 9d02009c <.L3> 9d020050: 00000000 nop 9d020054: 3c028001 lui v0,0x8001 9d020058: 8c438000 lw v1,-32768(v0) 9d02005c: 24020002 li v0,2 9d020060: 14620009 bne v1,v0,9d020088 <start_main+0x88> 9d020064: 00000000 nop 9d020068: 3c02bf88 lui v0,0xbf88 9d02006c: 24030024 li v1,36 9d020070: ac436124 sw v1,24868(v0) 9d020074: 3c02bf88 lui v0,0xbf88 9d020078: 34038008 li v1,0x8008 9d02007c: ac436128 sw v1,24872(v0) 9d020080: 0b408027 j 9d02009c <.L3> 9d020084: 00000000 nop 9d020088: 3c028001 lui v0,0x8001 9d02008c: ac408000 sw zero,-32768(v0) 9d020090: 3c02bf88 lui v0,0xbf88 9d020094: 3403802c li v1,0x802c 9d020098: ac436124 sw v1,24868(v0) 9d02009c <.L3>: 9d02009c: 03c0e821 move sp,s8 9d0200a0: 8fbe0004 lw s8,4(sp) 9d0200a4: 27bd0008 addiu sp,sp,8 9d0200a8: 03e00008 jr ra 9d0200ac: 00000000 nop 9d020300 <start_boot>: 9d020300: 27bdfff8 addiu sp,sp,-8 9d020304: afbe0004 sw s8,4(sp) 9d020308: 03a0f021 move s8,sp 9d02030c: 3c028001 lui v0,0x8001 9d020310: ac408000 sw zero,-32768(v0) 9d020314: 3c02bf88 lui v0,0xbf88 9d020318: 3403802c li v1,0x802c 9d02031c: ac436124 sw v1,24868(v0) 9d020320: 03c0e821 move sp,s8 9d020324: 8fbe0004 lw s8,4(sp) 9d020328: 27bd0008 addiu sp,sp,8 9d02032c: 03e00008 jr ra 9d020330: 00000000 nop |
丂
埲壓偵丄忋婰偺幚嵺偵摦嶌偟偨丄傾僙儞僽儕儕僗僩傪帵偟傑偡丅忋偺C尵岅偺媡傾僙儞僽儖儕僗僩傪僐乕僪偵偟偰傒傑偟偨丅
忋婰偺儌乕僞惂屼傪嶲峫偵嶌偭偨僐乕僪偱偡丅
丂丂忋婰偱曇廤偟偨傾僙儞僽儕僜乕僗傪丄嵍偺儃僞儞偱乽傾僢僙儞僽儖乿偱偒傑偡丅
斣抧偐傜幚峴偡傞UME愱梡Hex僐儅儞僪傪丄 嵟屻偵捛壛杽傔崬傒偡傞応崌偵僠僃僢僋偡傞亖亖亜
忋婰僐乕僪傪丄Python偱[UMEHOSHI ITA]婎斅偱揮憲偟偰幚峴偡傞庤弴偺徯夘
梊傔丄python偑摦嶌偡傞僞乕儈僫儖(僐儅儞僪僾儘儞僾僩)傪丄奐偄偰弨旛偟偰抲偔偲傛偄偱偟傚偆丅
埲壓偱偼丄R:\work傪嶌嬈埵抲乮僇儗儞僩僨傿儗僋僩儕乯偵偟偰愢柧偟偰偄傑偡丅
傑偨丄python僾儘僌儔儉偱偼丄pyserial儌僕儏乕儖傪捛壛偟偰偍偔昁梫偑偁傝傑偡丅
乽pip show serial乿偺僐儅儞僪憖嶌偱丄僀儞僗僩乕儖偝傟偰偄傞偐妋擣偱偒傑偡丅
僀儞僗僩乕儖偝傟偰偄側偄応崌偼丄乽pip install pyserial乿偺憖嶌偱丄僀儞僗僩乕儖偟偰偍偔偲椙偄偱偟傚偆丅
亂1亃 [UMEHOSHI ITA]婎斅偱揮憲偡傞僥僉僗僩僼傽僀儖乽command.txt乿傪梡堄偟傑偡丅
忋婰偺乽傾僙儞僽儔曇廤晹乿偺捈壓偵偁傞乽傾僙儞僽儖乿儃僞儞傪僋儕僢僋偟傑偡丅
乮偙偺儃僞儞塃壓偺丄巜掕傾僪儗僗偐傜幚峴偝偣傞僐乕僪杽傔崬傒梡偺僠僃僢僋儃僢僋僗偑僠僃僢僋偝傟偰偄傞偙偲妋擣偟偰峴偆乯
乽傾僙儞僽儔曇廤晹乿偺僜乕僗偵僄儔乕偑柍偗傟偽丄[UME愱梡Hex僐儅儞僪]偺僥僉僗僩偑丄偦偺壓偺 TextArea 偵昞帵偝傟傑偡丅
乮僄儔乕偑偁傟偽丄僄儔乕偑柍偔HEX僐乕僪偑惗惉偝傟傞傑偱丄乽傾僙儞僽儔曇廤晹乿偺廋惓偲傾僙儞僽儖乿傪孞傝曉偟傑偡乯
儊儌挔側偳偱丄乽command.txt乿偺僼傽僀儖傪惗惉偟偰奐偒丄
忋婰憖嶌偱摼傜傟偨TextArea偺[UME愱梡Hex僐儅儞僪]偺僥僉僗僩傪丄 僐僺乕(CTRL+A CTRL+C)憖嶌偟丄
丂丂偦傟傪乽command.txt乿曇廤夋柺偱揬傝晅偗乮(CTRL+V乯偟偰丄曐懚偟傑偡丅
曐懚埵抲偼丄python偑摦嶌偡傞僞乕儈僫儖偺嶌嬈埵抲乮僇儗儞僩僨傿儗僋僩儕乯偱偡丅(屻弎椺偱偼丄R:\work偱帵偟偰偄傑偡乯
亂2亃 [UMEHOSHI ITA]婎斅傊[command.txt乿傪揮憲偡傞python僼傽僀儖傪梡堄偟傑偡丅
乽instruct.py乿偺柤慜偺僜乕僗僼傽僀儖傪丄[command.txt乿偲摨偠埵抲偵嶌傝傑偡丅乮堦搙嶌傟偽丄師夞偼巊偆偩偗偱丄嶌傞昁梫偼偁傝傑偣傫丅(CTRL+A CTRL+C)憖嶌偱丄僐僺乕壜擻乯
亂3亃 [UMEHOSHI ITA]婎斅傊[command.txt乿傪揮憲偟偰幚峴偝偣傞丅
忋婰偱嶌偭偨乽instruct.py乿偲[command.txt乿偑懚嵼偡傞埵抲偱丄
python偑摦嶌偡傞僞乕儈僫儖(僐儅儞僪僾儘儞僾僩)傪奐偒傑偡丅
埲壓偱偼丄偙偺嶌嬈埵抲乮僇儗儞僩僨傿儗僋僩儕乯偑丄R:\work偱偁傞応崌偺椺偱愢柧偟偰偄傑偡丅
傑偢 [UMEHOSHI ITA]婎斅偲丄PC傪USB偱愙懕偟傑偡丅
師偵僞乕儈僫儖僾儘儞僾僩傪亀powershell亁偵偟偰丄
亀Get-CimInstance Win32_PnPEntity | Where-Object {$_ -like "*(COM*"} | Select-Object Caption亁
偺僐儅儞僪憖嶌偱丄USB偺僔儕傾儖 僨僶僀僗偺COM斣崋傪挷傋傑偡丅
R:\work>powershell
Windows PowerShell
Copyright (C) Microsoft Corporation. All rights reserved.
怴偟偄僋儘僗僾儔僢僩僼僅乕儉偺 PowerShell 傪偍帋偟偔偩偝偄 https://aka.ms/pscore6
PS R:\work> Get-CimInstance Win32_PnPEntity | Where-Object {$_ -like "*(COM*"} | Select-Object Caption
Caption
-------
Bluetooth 儕儞僋宱桼偺昗弨僔儕傾儖 (COM10)
USB 僔儕傾儖 僨僶僀僗 (COM4)
Bluetooth 儕儞僋宱桼偺昗弨僔儕傾儖 (COM11)
PS R:\work>
偙偺幚峴椺偐傜丄USB 僔儕傾儖 僨僶僀僗 偑COM4偑巊偊傞忬懺偵側偭偰偄傞偙偲偑暘偐傝傑偡丅
乮偙偺儕儞僋儁乕僕偱帵偡傛偆偵丄僨僶僀僗儅僱乕僕儍偱妋擣偡傞偙偲傕偱偒傑偡乯
偙偺斣崋偺4傪婰壇偟偰師偺揮憲僾儘僌儔儉幚峴偵恑傓偺偱偡偑丄
偦偺USB 僔儕傾儖 僨僶僀僗 偑尒偮偐傜側偄応崌丄師偺揰偑峫偊傜傟傑偡丅
- 惓偟偔[UMEHOSHI ITA]婎斅偑USB偱愙懕偝傟偰偄側偄丅
- USB偺CDC僪儔僀僶偑Windows偱巊偊傞忬懺偵側偭偰偄側偄丅
丂丂丂乮Microchip幮 USB CDC梡 Driver偑帺摦揑偵僀儞僗僩乕儖偝傟傞偼偢偱偡偑丄偦傟偑摥偄偰偄側偄側偳 乯 - [UMEHOSHI ITA]婎斅偱丄婛偵USB傪夘偝側偄僾儘僌儔儉偑摦偄偰偄傞丅
丂丂乮偙偺応崌丄揹尮傪擖傟捈偡乮傑偨偼SW1偲SW2傪墴偟偰丄SW1傪棧偟偰偐傜2昩埲撪偱SW2傪棧偡憖嶌乯弶婜壔偱丄USB捠怣偑壜擻偲側傝傑偡乯
懕偄偰丄埲壓偺亀python command.txt亁偺憖嶌偱丄揮憲幚峴僾儘僌儔儉乮忋婰偺傾僙儞僽儔梡偺椺乯傪幚峴偟傑偡丅
幚峴椺丂乮嵟弶偵忋婰偱摼傜傟偨斣崋偺4傪僉乕擖椡偟偰偄傑偡丅乯
R:\work>python instruct.py USB 僔儕傾儖 僨僶僀僗偱丄巊梡偡傞COM偺斣崋傪擖椡亜亜4 S04800080000000000000 D9僠僃僢僋僒儉丗 0 USB庴怣仠 b'S04800080000000000000D9\r\n' USB庴怣仠 b'SET:80008000\r\n' S108000500000E8FFBD271400BFAF1000BEAF21F0A003 17僠僃僢僋僒儉丗 0 USB庴怣仠 b'S108000500000E8FFBD271400BFAF1000BEAF21F0A00317\r\n' USB庴怣仠 b'SET:80005000\r\n' S10800050100000A0023CF44042340000428C029D033C B1僠僃僢僋僒儉丗 0 USB庴怣仠 b'S10800050100000A0023CF44042340000428C029D033CB1\r\n' USB庴怣仠 b'SET:80005010\r\n' S10800050200000036324039D043CF0FF843421286000 A9僠僃僢僋僒儉丗 0 USB庴怣仠 b'S10800050200000036324039D043CF0FF843421286000A9\r\n' USB庴怣仠 b'SET:80005020\r\n' S10800050300009F840000000000021E8C0031400BF8F B0僠僃僢僋僒儉丗 0 USB庴怣仠 b'S10800050300009F840000000000021E8C0031400BF8FB0\r\n' USB庴怣仠 b'SET:80005030\r\n' S1080005040001000BE8F1800BD270800E00300000000 BD僠僃僢僋僒儉丗 0 USB庴怣仠 b'S1080005040001000BE8F1800BD270800E00300000000BD\r\n' USB庴怣仠 b'SET:80005040\r\n' S109D02000000F8FFBD270400BEAF21F0A0030180023C 34僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D02000000F8FFBD270400BEAF21F0A0030180023C34\r\n' USB庴怣仠 b'SET:9D020000\r\n' S109D020010000080428C010043240180023C008043AC C1僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D020010000080428C010043240180023C008043ACC1\r\n' USB庴怣仠 b'SET:9D020010\r\n' S109D0200200001000224090062140000000088BF023C DC僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D0200200001000224090062140000000088BF023CDC\r\n' USB庴怣仠 b'SET:9D020020\r\n' S109D0200300008800324246143AC88BF023C24000324 9A僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D0200300008800324246143AC88BF023C240003249A\r\n' USB庴怣仠 b'SET:9D020030\r\n' S109D02004000286143AC2580400B000000000180023C C7僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D02004000286143AC2580400B000000000180023CC7\r\n' USB庴怣仠 b'SET:9D020040\r\n' S109D020050000080438C020002240900621400000000 FE僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D020050000080438C020002240900621400000000FE\r\n' USB庴怣仠 b'SET:9D020050\r\n' S109D0200600088BF023C24000324246143AC88BF023C 60僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D0200600088BF023C24000324246143AC88BF023C60\r\n' USB庴怣仠 b'SET:9D020060\r\n' S109D0200700008800324286143AC2580400B00000000 CC僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D0200700008800324286143AC2580400B00000000CC\r\n' USB庴怣仠 b'SET:9D020070\r\n' S109D020080000180023C008040AC88BF023C2C800324 7E僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D020080000180023C008040AC88BF023C2C8003247E\r\n' USB庴怣仠 b'SET:9D020080\r\n' S109D02009000246143AC21E8C0030400BE8F0800BD27 56僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D02009000246143AC21E8C0030400BE8F0800BD2756\r\n' USB庴怣仠 b'SET:9D020090\r\n' S089D0200A0000800E00300000000 15僠僃僢僋僒儉丗 0 USB庴怣仠 b'S089D0200A0000800E0030000000015\r\n' USB庴怣仠 b'SET:9D0200A0\r\n' S109D02030000F8FFBD270400BEAF21F0A0030180023C 31僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D02030000F8FFBD270400BEAF21F0A0030180023C31\r\n' USB庴怣仠 b'SET:9D020300\r\n' S109D02031000008040AC88BF023C2C800324246143AC 6B僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D02031000008040AC88BF023C2C800324246143AC6B\r\n' USB庴怣仠 b'SET:9D020310\r\n' S109D0203200021E8C0030400BE8F0800BD270800E003 72僠僃僢僋僒儉丗 0 USB庴怣仠 b'S109D0203200021E8C0030400BE8F0800BD270800E00372\r\n' USB庴怣仠 b'SET:9D020320\r\n' S049D0203300000000000 C4僠僃僢僋僒儉丗 0 USB庴怣仠 b'S049D0203300000000000C4\r\n' USB庴怣仠 b'SET:9D020330\r\n' R008000500000 61僠僃僢僋僒儉丗 0 幚峴僗僞乕僩偺 Enter >> USB庴怣仠 b'R00800050000061\r\n' USB庴怣仠 b'START:80005000\r\n' 廔椆妋擣偺 Enter >>> R:\work>
[command.txt乿偺拞偵"R008000500000"偺傛偆側幚峴僐儅儞僪偑懚嵼偡傞偲丄幚峴僗僞乕僩偺 Enter >>偺
僾儘儞僾僩偑弌偰丄堦帪掆巭偟傑偡丅
偙傟偱0x80005000偐傜偺RAM椞堟偲丄0x9D020000偐傜偲0x9D020300偐傜偺EEPROM椞堟偵僾儘僌儔儉偑攝抲偝傟傑偡丅
偦偙偱ENTER僉乕傪擖椡偡傞偙偲偱丄"R00800050000061"偑憲傜傟丄UMEHOSHI ITA婎斅偱乽0x80005000乿斣抧偐傜幚峴偟傑偡偑丄
偦傟偼丄0x9D03fff0偺EEPROM椞堟偵僷儚乕僆儞偱幚峴偡傞偨傔偺0x9D020300偐傜巒傑傞start_boot娭悢傪搊榐偡傞偩偗偱偡丅
偙偙偱丄USB偺働乕僽儖堦搙敳偄偰丄夵傔偰嵎偟崬傫偱揹尮傪嫙媼偟傑偡丅乮僷儚乕僆儞帪偩偗幚峴偡傞start_boot娭悢偑幚峴乯
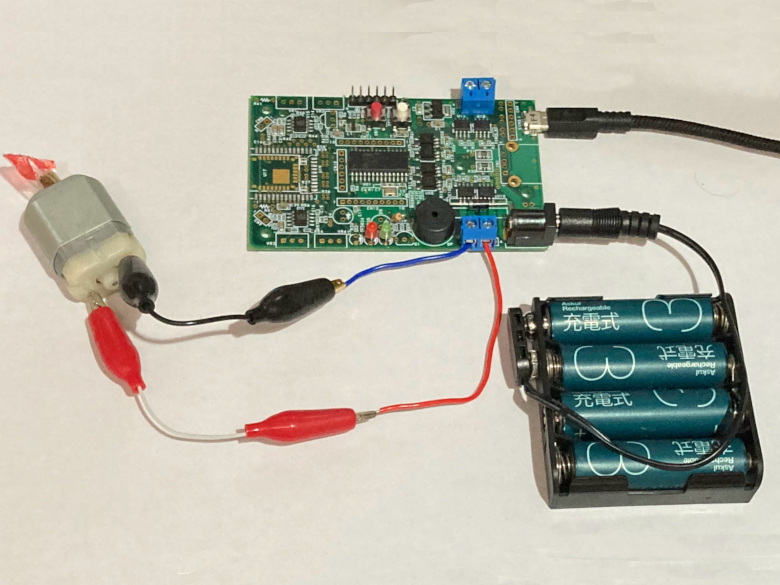
偦偟偰愒偺儕僙僢僩僗僀僢僠傪墴偡偲丄CN6僐僱僋僞偵惓揮偺揹埑偑報壛偝傟偰儌乕僞傪摦偐偟偰丄LED偺D2傪揰摂偝偣傑偡丅
嵞傃丄愒偺儕僙僢僩僗僀僢僠傪墴偡偲丄儌乕僞偑媡揮偟偰丄LED偺D2偼徚摂偟傑偡丅
嵞傃丄愒偺儕僙僢僩僗僀僢僠傪墴偡偲丄儌乕僞偑掆巭偟傑偡丅
嵞傃丄愒偺儕僙僢僩僗僀僢僠傪墴偡偲丄儌乕僞偺惓揮偲LED偺LED偺D2偺揰摂偵栠傝傑偡丅
乮儕僙僢僩僗僀僢僠偱start_main()娭悢偑幚峴偝傟丄cn6偺曄悢偑丄0仺1仺2仺0仺1仺2丒丒丒偲曄壔偟偰懳墳偺儌乕僞惂屼偑峴傢傑偡丅乯
側偍丄EEPROM偺徚嫀偼丄偙偪傜偱帵偡曽朄偱徚嫀偱偒傑偡丅