
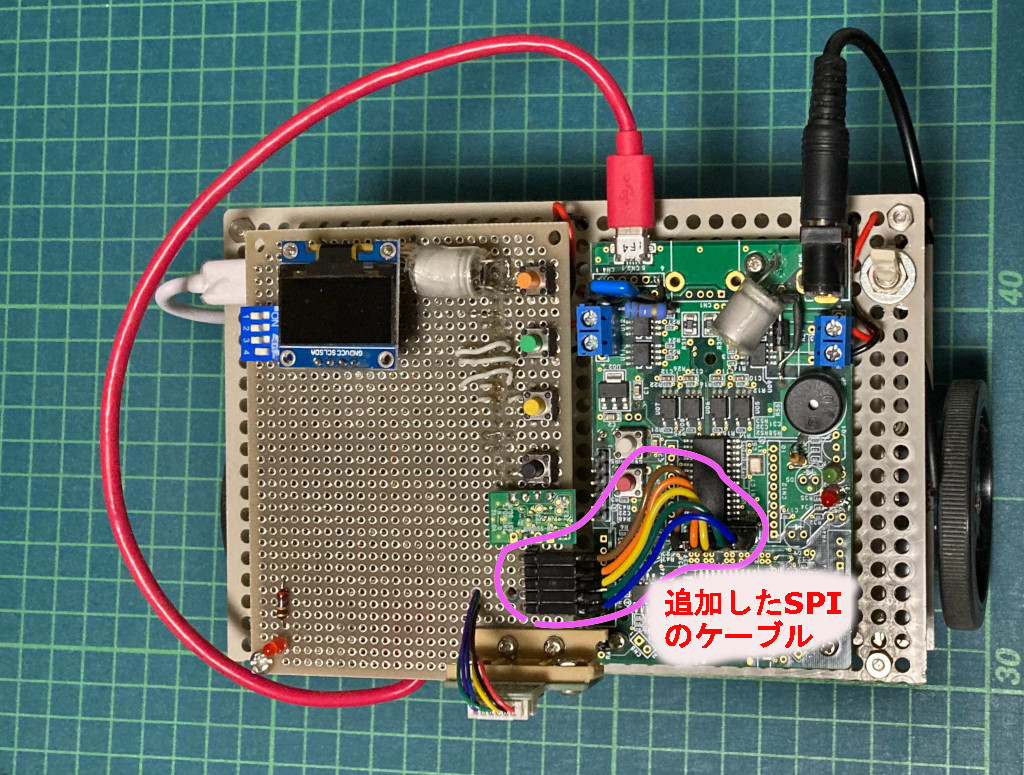
拡張ボードでSPI用のコネクタを追加した回路結線図&配置図
このページで示したロボットの倒立振子の検討の記録の続きのページです。
なお、EEPROMの内容は、このページで作成した内容と同じですが、その処理は使っていません。
(別途のRAMにSPI受信処理を埋め込む方式で検討しています)
 で示したように振動を止めることができませんでした。
で示したように振動を止めることができませんでした。| 項目 | Master | Slave |
|---|---|---|
| クロック | 生成する(出力端子) | 受け取る(受信端子) |
| CS制御 | 制御する(出力端子) | 選択される(受信端子) |
| 通信開始 | できる | できない |
| 通信速度 | 決定する | 従う |
| MOSI(Master Out Slave In) | 送信 | 受信 |
| MISO(Master In Slave Out) | 受信 | 送信 |
| CN10 端子番号 | PIC32MXの端子番号 | 変更前のUART1 | 変更後のSPI(スレーブ) | 拡張基板内 コネクタ番号 | Raspberry ピン番号とSPI端子(マスター) |
|---|---|---|---|---|---|
| 1 | 18 RB9 | RTS(出力) | RB9を SS2 イネーブル入力端子にPPSで変更 | 1 | Pin24 GPIO8 (CE0) |
| 2 | 28 | Vcc(3.3v) | Vcc(3.3v) | ||
| 3 | 27 | GND | GND | 2 | GND |
| 4 | 12 RA4 | RX(入力) | RA4をSDI2(入力)にPPSで変更 | 3 | Pin19 GPIO10 (MOSI) |
| 5 | 11 RB4 | TX(出力) |
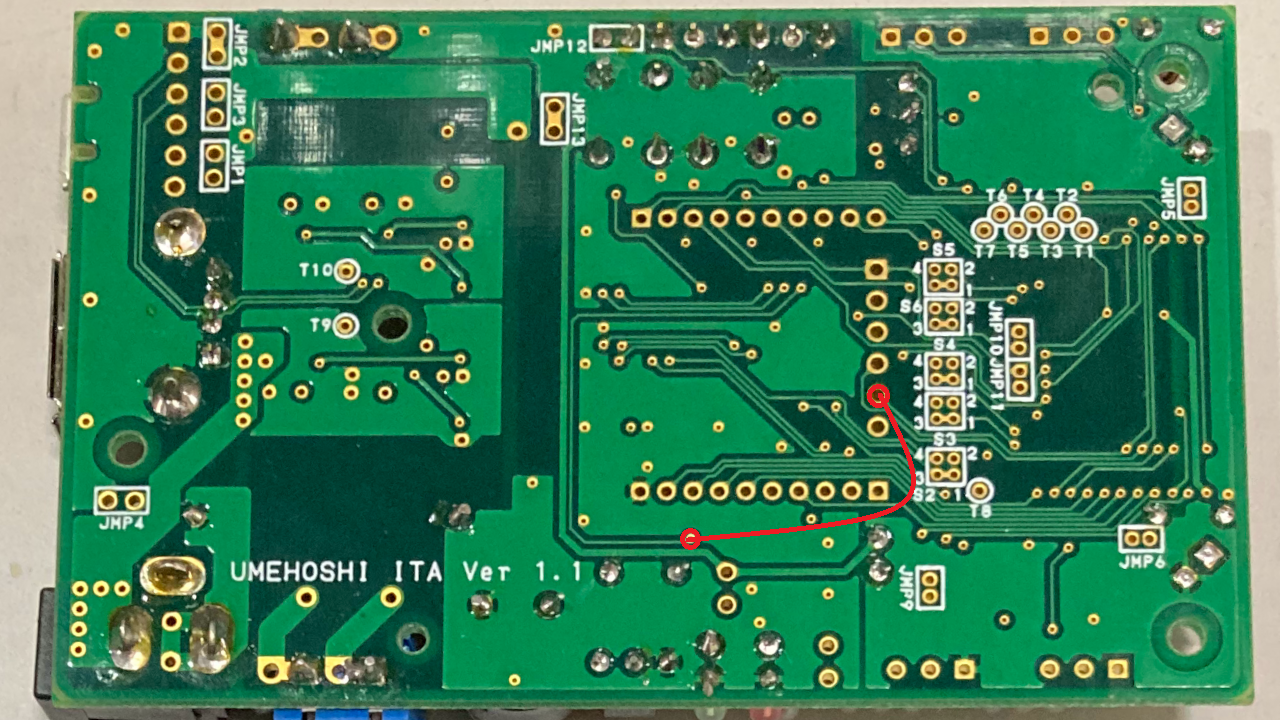
RB4を単なる入力端子に変更 SCLK2 (PIC32のRB15をPPSで変更した26番ピンにジャンパー接続) | 4 | Pin23 GPIO11 (SCLK) |
| 6 | 17 RB8 | CTS(入力) | RB8をSDO2(出力)にPPSで変更 | 5 | Pin21 GPIO9 (MISO) |
|
|
[Raspberry Pi 3 Model A+]と[UMEHOSHI ITA]を乗せたモータ付き台車で、 拡張ボードでSPI用のコネクタを追加した回路結線図&配置図 |
suzuki@raspberrypi:~ $ ls /dev/spidev* /dev/spidev0.0 /dev/spidev0.1 suzuki@raspberrypi:~ $ suzuki@raspberrypi:~ $ lsmod | grep spi spidev 20480 0 spi_bcm2835 20480 0 suzuki@raspberrypi:~ $/dev/spidev0.0と /dev/spidev0.1は、それぞれが SPIバス0のCE0がGPIO8(Pin24)で使えることと、CE1のGPIO7(Pin26)が使えることを示している。
import spidev
import time
spi = spidev.SpiDev() # SPI操作オブジェクト生成
spi.open(0, 0) # bus=0 device=0 (CE0) でSPIオープン
spi.max_speed_hz = 7812500 # 7.8 MHzSPIクロック
spi.mode = 0 # クロック信号(SCLK)はLow待機、LowからHighに立ち上がる瞬間でデータを読み取り
v=0 # 送信データ(0,1,2・・・・と増やした値を Enterキー操作で少しずつ送る)
while True:
send_data = [v] # 例えばビッグエンディアンで0x15AFを送るなら[0x15, 0xAF]のリストで送る。決まってないが一般の受信側のオーダーで送る。
input("Enter>") # Enterで送信へ進む
print("Send :", send_data)
recv_data = spi.xfer2(send_data)# 送受信
# print("Send :", send_data) # (send_dataの内容は、受信データ置き換わる挙動もある)
print("Recv :", recv_data)
time.sleep(0.1)
v += 1 # 送信データの後進
#include <xc.h>
#include <stdio.h>
#include <stdlib.h>
#include "common.h"
#include <proc/p32mx270f256b.h>
#include <sys/attribs.h>//割込み関係の定義
int spi_out_v = 0x0ff; // SPI出力用データ
/*
PIC32MX270F256B-50I/SP (SP は 28pin SPDIP パッケージ)のUART1を、
18番ピンをRTS(出力)、12ピンをRX(入力)、11ピンをTX(出力)、17ピンRB8をCTS(入力)
として使っているが、 これを、次のSPI2のスレーブモードに設定し直す
18番ピンをCS GPIO入力、12ピンをSDI2(入力)、11ピンRB5をSDO2(出力)、17ピンをデジタル入力
そのためのPPSは「ピン配線設定」関数。つまり **「配線設定」**です。
*/
void PPS_Init_SPI2_Slave(void)
{
/* ---------- UART1のフロー制御(CTS/RTS)を解除 ---------- */
U1MODEbits.UEN = 0b00; // UART1はTX/RXのみ使用(CTS/RTSピンを開放)
U1MODEbits.ON = 0; // UART1自体を使わない場合は停止
ODCBbits.ODCB9 = 0; // RB9デフォルト設定のオープンドレイン無効
CNPUBbits.CNPUB9 = 0;//CNPUB (Change Notice Pull-up B) レジスタの第9ビットを0
//(これにより、RB9ピンの内部プルアップ抵抗を無効)
CNPDBbits.CNPDB9 = 0;//CNPDB (Change Notice Pull-down B)レジスタの第9ビットを 0
//(これにより、RB9ピンの内部プルダウン抵抗を無効)
LATBbits.LATB9 = 1; // RB9のRTS(出力)をHiにする
TRISBbits.TRISB9 = 1;// RB9を入力ピンにする (基板のパターンが繋がっているため)
LATBbits.LATB4 = 1; // RB4を1にする。(必要ないかも?)
TRISBbits.TRISB4 = 1; // RB4を入力用に指定
ODCBbits.ODCB4 = 0; // デフォルト設定のオープンドレイン無効
CNPUBbits.CNPUB4 = 0;//内部プルアップ抵抗を無効
CNPDBbits.CNPDB4 = 0;//内部プルダウン抵抗を無効
TRISAbits.TRISA4 = 1; // RA4 (pin12) SDI2入力へ
ANSELBbits.ANSB15 = 0; // 26番ピンのRB15をデジタルモードに設定
TRISBbits.TRISB15 = 1; // スレーブの場合は入力、マスターなら0(出力)に設定
TRISBbits.TRISB8 = 0; // RB8を出力用に指定
CNPUBbits.CNPUB8 = 0;//内部プルアップ抵抗を無効
/* ---------- PPS設定アンロック ---------- */
SYSKEY = 0xAA996655; // 書き込み保護解除キー1
SYSKEY = 0x556699AA; // 書き込み保護解除キー2
CFGCONbits.IOLOCK = 0; // PPSレジスタのロック解除
/* ---------- 入力PPS設定 ---------- */
SS2R = 0b0100; // SS2入力をRB9へ
SDI2R = 0b0010; // SDI2入力をRA4へ
/* ---------- 出力PPS設定 ---------- */
RPB8R = 0b0100; // SDO2へ
asm("NOP");
/* ---------- PPS再ロック ---------- */
CFGCONbits.IOLOCK = 1;
SYSKEY = 0; // 保護再有効
}
/*
SPI2に関する周辺機能設定の初期設定
* クロック極性、スレーブ設定、割り込みなど、ここだけ変更する可能性を考慮して
* 「ピン配線設定」のPPS_Init_SPI2_Slaveを別関数にしている。
*/
void Init_SPI2_Slave(void)
{
_RB5 = 1; // D1 LED の初期点灯設定
PPS_Init_SPI2_Slave(); // PIC32MX270F256B-50I/SP のSPI2スレーブ用端子にピン割り当てを変更
SPI2CON = 0; // SPI2制御レジスタ初期化
SPI2STAT = 0; // ステータス初期化
/* ---------- SPIモード設定 ---------- */
SPI2CONbits.MSTEN = 0; // 0 = スレーブモード
SPI2CONbits.SSEN = 1; // SS有効 Slave Select Enable (Slave mode) bit
SPI2CONbits.MODE16 = 0; // 8bit通信
SPI2CONbits.MODE32 = 0; // 32bit通信無効
/* SPIモード0設定 (多くのマスターが使用) */
SPI2CONbits.CKP = 0; // クロックアイドルLow
SPI2CONbits.CKE = 1; // クロック立上りでデータ更新
SPI2CONbits.SMP = 0; // スレーブでは通常0
SPI2BUF; // バッファをダミー読み出し
SPI2STATbits.SPIROV = 0; // 受信オーバーフロークリア
// SPI用Enhanced Buffer(ENHBUF)を0(デフォルト)に指定(重要)
SPI2CONbits.ENHBUF = 0;
SPI2CONbits.SRXISEL = 1; //01受信バッファが1byteに指定
SPI2CONbits.ON = 1; // SPI2モジュール有効
SPI2BUF = spi_out_v;// 最初の送信データのセット(重要)
}
void timer4() // SPIスレーブ のポーリング処理の確認用タイマー処理
{
static int count = 0;
if(++count % 1000 != 0) return;
// count が 1000の倍数時だけ(0.5秒ごと)に以下を実行
_RB5 = ! _RB5;// このタイマーの動作確認用の D1 LED 点滅の出力を反転
if (SPI2STATbits.SPIRBF == 1) { // SPI受信バッファが一杯になったら
// ここを通るなら、SPI受信ができている(配線とSPI設定はOK)
uint8_t rxData = SPI2BUF; // 受信データを読み出す(これでSPIRBFが0に戻る)
_clear_beep_code();
_debug_hex8(0, rxData , 1); // 受信データ確認
spi_out_v-=1;
while(SPI2STATbits.SPITBE == 0); // 送信バッファ空待ち
SPI2BUF = spi_out_v;// 次の送信データのセット
}
if (SPI2STATbits.SPIROV == 1) { // エラーフラグが立っていないか
SPI2STATbits.SPIROV = 0; // 一旦クリア
_debug_hex16(0, SPI2BUF, 1);
}
}
// UMEHOSHI ITA のRAMプログラムの設定希望プログラム(0x80005000番地より起動)
__attribute__((address( 0x80005000 ))) void start (void);
void start()
{
_clear_beep_code(); // _debug_hex? 関数利用の初期化
_UM_PTR_GOTO_BEEP = NULL; // debug_hex?の出力をループしない設定
Init_SPI2_Slave();// SPI2の初期化
// デフォルトで0.00005秒ごとに呼び出される関数に、SPIスレーブ のポーリング処理のtimer4を設定
_HANDLES[_IDX_TIMER_4_FUNC] = timer4;
T4CONbits.ON = 1;// timer4割込みオン(SPIスレーブ のポーリングの起動)
_RB5 = 0; // D1 LED の消灯
_debug_hex4(0,0x0f,1);// _debug_hex? の動作確認用
_send_string("start END\r\n");//起動関数終了の表示
}
上記はTimer4のインターバルタイマーの割り込みを使い、この繰り返しの中でSPIの受信を監視して、受信処理をする例です。
void __ISR(_SPI2_VECTOR, IPL3SOFT) SPI2_Handler(void)
{
((void (**)(void) )_PTR_HANDLERS)[_IDX_SPI2_FUNC]();
}
つまり、_PTR_HANDLERS)[_IDX_SPI2_FUNC]に、ユーザー作成の割り込み処理のポイントを記憶しておいて、それを実行させるコードです。#define _IDX_PPS_INIT_SPI2_SLAVE 70 // ★ SPI2のPPS 設定 PPS_Init_SPI2_Slave #define _PPS_Init_SPI2_Slave() (((void (**)(void) )_PTR_HANDLERS)[_IDX_PPS_INIT_SPI2_SLAVE]()) #define _IDX_INIT_SPI2_SLAVE 71 // ★ SPI2の初期設定 割り込みを含む初期化 Init_SPI2_Slave #define _Init_SPI2_Slave() (((void (**)(void) )_PTR_HANDLERS)[_IDX_INIT_SPI2_SLAVE]()) #define _IDX_SPI2_FUNC 72 // ★ SPI2割り込みで呼ぶ関数記憶用の添え字そして、上記の_PTR_HANDLERS[_IDX_PPS_INIT_SPI2_SLAVE]に記憶する次のデフォルト関数を次のように定義しています。
/*
PIC32MX270F256B-50I/SP (SP は 28pin SPDIP パッケージ)のUART1を、
18番ピンをRTS(出力)、12ピンをRX(入力)、11ピンをTX(出力)、17ピンRB8をCTS(入力)
として使っているが、 これを、次のSPI2のスレーブモードに設定し直す
18番ピンをCS GPIO入力、12ピンをSDI2(入力)、11ピンRB5をSDO2(出力)、17ピンをデジタル入力
そのためのPPSは「ピン配線設定」関数。つまり **「配線設定」**です。
*/
void PPS_Init_SPI2_Slave(void)
{
/* ---------- UART1のフロー制御(CTS/RTS)を解除 ---------- */
U1MODEbits.UEN = 0b00; // UART1はTX/RXのみ使用(CTS/RTSピンを開放)
U1MODEbits.ON = 0; // UART1自体を使わない場合は停止
ODCBbits.ODCB9 = 0; // RB9デフォルト設定のオープンドレイン無効
CNPUBbits.CNPUB9 = 0;//CNPUB (Change Notice Pull-up B) レジスタの第9ビットを0
//(これにより、RB9ピンの内部プルアップ抵抗を無効)
CNPDBbits.CNPDB9 = 0;//CNPDB (Change Notice Pull-down B)レジスタの第9ビットを 0
//(これにより、RB9ピンの内部プルダウン抵抗を無効)
LATBbits.LATB9 = 1; // RB9のRTS(出力)をHiにする
TRISBbits.TRISB9 = 1;// RB9を入力ピンにする (基板のパターンが繋がっているため)
LATBbits.LATB4 = 1; // RB4を1にする。(必要ないかも?)
TRISBbits.TRISB4 = 1; // RB4を入力用に指定
ODCBbits.ODCB4 = 0; // デフォルト設定のオープンドレイン無効
CNPUBbits.CNPUB4 = 0;//内部プルアップ抵抗を無効
CNPDBbits.CNPDB4 = 0;//内部プルダウン抵抗を無効
TRISAbits.TRISA4 = 1; // RA4 (pin12) SDI2入力へ
ANSELBbits.ANSB15 = 0; // 26番ピンのRB15をデジタルモードに設定
TRISBbits.TRISB15 = 1; // スレーブの場合は入力、マスターなら0(出力)に設定
TRISBbits.TRISB8 = 0; // RB8を出力用に指定
CNPUBbits.CNPUB8 = 0;//内部プルアップ抵抗を無効
/* ---------- PPS設定アンロック ---------- */
SYSKEY = 0xAA996655; // 書き込み保護解除キー1
SYSKEY = 0x556699AA; // 書き込み保護解除キー2
CFGCONbits.IOLOCK = 0; // PPSレジスタのロック解除
/* ---------- 入力PPS設定 ---------- */
SS2R = 0b0100; // SS2入力をRB9へ
SDI2R = 0b0010; // SDI2入力をRA4へ
/* ---------- 出力PPS設定 ---------- */
RPB8R = 0b0100; // SDO2へ
asm("NOP");
/* ---------- PPS再ロック ---------- */
CFGCONbits.IOLOCK = 1;
SYSKEY = 0; // 保護再有効
}
同様で、my_option.cに_PTR_HANDLERS[__IDX_PPS_INIT_SPI2_SLAVE]に記憶する次のデフォルト関数を次のように定義しています。
/*
SPI2に関する周辺機能設定の初期設定
* クロック極性、スレーブ設定、割り込みなど、ここだけ変更する可能性を考慮して
* 「ピン配線設定」のPPS_Init_SPI2_Slaveを別関数にしている。
*/
void Init_SPI2_Slave(void)
{
_RB5 = 1; // D1 LED の初期点灯設定
PPS_Init_SPI2_Slave(); // PIC32MX270F256B-50I/SP のSPI2スレーブ用端子にピン割り当てを変更
SPI2CON = 0; // SPI2制御レジスタ初期化
SPI2STAT = 0; // ステータス初期化
/* ---------- SPIモード設定 ---------- */
SPI2CONbits.MSTEN = 0; // 0 = スレーブモード
SPI2CONbits.SSEN = 1; // SS有効 Slave Select Enable (Slave mode) bit
SPI2CONbits.MODE16 = 0; // 8bit通信
SPI2CONbits.MODE32 = 0; // 32bit通信無効
/* SPIモード0設定 (多くのマスターが使用) */
SPI2CONbits.CKP = 0; // クロックアイドルLow
SPI2CONbits.CKE = 1; // クロック立上りでデータ更新
SPI2CONbits.SMP = 0; // スレーブでは通常0
SPI2BUF; // バッファをダミー読み出し
SPI2STATbits.SPIROV = 0; // 受信オーバーフロークリア
// SPI用Enhanced Buffer(ENHBUF)を0(デフォルト)に指定(重要)
SPI2CONbits.ENHBUF = 0;
SPI2CONbits.SRXISEL = 1; //01受信バッファが1byteに指定
/* ---------- 割り込み設定 ---------- */
IFS1bits.SPI2RXIF = 0; // 受信割り込みフラグクリア
IEC1bits.SPI2RXIE = 1; // SPI2受信割り込み許可
//IEC1bits.SPI2TXIE = 1; // SPI2送信割り込み許可
IEC1bits.SPI2EIE = 1; // SPI2エラー割り込み許可
IPC9bits.SPI2IP = 3; // 優先度(Priority)を 3 に設定 (1?7)
IPC9bits.SPI2IS = 0; // 副優先度(Sub-priority)を 0 に設定 (0?3)
SPI2CONbits.ON = 1; // SPI2モジュール有効
}
以上の関数定義は、my_sys.cのinit_handle_area関数内に、次のコード追加で行っています。
extern void PPS_Init_SPI2_Slave(void);
extern void Init_SPI2_Slave(void);
extern void SPI2_Slave_func(void);
handlers[_IDX_PPS_INIT_SPI2_SLAVE]=(void *)PPS_Init_SPI2_Slave; // SPI2利用のためのPPS設定
handlers[_IDX_INIT_SPI2_SLAVE]=(void *)Init_SPI2_Slave; // SPI2の初期化デファルト関数登録
handlers[_IDX_SPI2_FUNC]=(void *)SPI2_Slave_func; // SPI2受信割り込みデファルト
#include <xc.h>
#include <stdio.h>
#include <stdlib.h>
#include "common.h"
#include <proc/p32mx270f256b.h>
#include <sys/attribs.h>//割込み関係の定義
int spi_out_v = 0x0ff; // SPI出力用データ
void SPI2_Slave_func(void)// スレーブ用割り込み処理から呼ばれる
{
/* ---- 受信割り込み ---- */
if (IFS1bits.SPI2RXIF)// SPI2RXIF = 受信バッファにデータが入った
{
uint8_t data;
data = SPI2BUF; // SPI受信データを読む
// 読まないとSPIROV(オーバーフロー)が発生する
/* ここで data を処理する */
_clear_beep_code();
_debug_hex8(0, data, 1); // 受信データ確認
spi_out_v-=1;
while(SPI2STATbits.SPITBE == 0); // 送信バッファ空待ち
SPI2BUF = spi_out_v;// 次の送信データのセット
}
/* ---- 送信割り込み ---- */
/* PIC32(および多くのマイコン)において、「割り込みフラグ(IFS)」と「割り込み許可ビット(IEC)」は独立して動いているため
受信で割り込みがあると、送信割り込みを不許可にしても、「割り込みフラグ(IFS)」がセットされる。
(書かない方はよい。)
if (IFS1bits.SPI2TXIF)// SPI2TXIF = 送信バッファが空
{
SPI2BUF = 0x55; // 次の送信データを書く
// 書くと送信開始される
IFS1bits.SPI2TXIF = 0; // TX割り込みフラグクリア
}
*/
/* ---- エラー割り込み ---- */
if (IFS1bits.SPI2EIF)
{
SPI2STATbits.SPIROV = 0; // 受信オーバーフロー解除
IFS1bits.SPI2EIF = 0; // エラーフラグクリア
}
}
// UMEHOSHI ITA のRAMプログラムの設定希望プログラム(0x80005000番地より起動)
__attribute__((address( 0x80005000 ))) void start (void);
void start()
{
_clear_beep_code(); // _debug_hex? 関数利用の初期化
_UM_PTR_GOTO_BEEP = NULL; // debug_hex?の出力をループしない設定
_HANDLES[_IDX_SPI2_FUNC] = (void *)SPI2_Slave_func;// SPI割り込み関数の登録
((void (**)(void) )_PTR_HANDLERS)[_IDX_INIT_SPI2_SLAVE]();// SPI2の初期化
SPI2BUF = spi_out_v;// 最初の送信データのセット(重要)
_RB5 = 0; // D1 LED の消灯
_debug_hex4(0,0x0f,1);// _debug_hex? の動作確認用
_send_string("start END\r\n");//起動関数終了の表示
}
| SPI送信データの意味 | 右モータのPWMの データMSByte | 右モータのPWMの データLSByte | 左モータのPWMの データMSByte | 左モータのPWMの データLSByte |
|---|---|---|---|---|
| 上のデータの識別番号 | 0 | 1 | 2 | 3 |
import spidev
import time
def spi_send(spi: spidev.SpiDev, datas: list):
# spiで、listのbyte列を送る。 (送信成功で、Trueを返す)
mas_req_idx:int=0 # 要求されたデータの添え字
last_idx = len(datas)-1
fail_count=0
while True:
send_data = datas[mas_req_idx]
rec_data = spi.xfer2([send_data])[0] # 1byte送受信
print(f"send[{mas_req_idx}]:{send_data},receive: {rec_data}")
if rec_data > last_idx: return False # スレーブから想定外の受信
if rec_data == mas_req_idx: # 受信エラーと判断し、先頭から送り直す。
mas_req_idx = 0
fail_count+=1 # 失敗数カウント
if fail_count > 5: return False # 送信失敗
time.sleep(0.001) # チョット待つ
continue
if mas_req_idx == last_idx: return True # 送信成功終了
mas_req_idx = rec_data # 次のデータの添え字に更新
#
#
spi = spidev.SpiDev() # SPI操作オブジェクト生成
spi.open(0, 0) # bus=0 device=0 (CE0) でSPIオープン
spi.max_speed_hz = 7812500 # 7.8 MHzSPIクロック
spi.mode = 0 # クロック信号(SCLK)はLow待機、LowからHighに立ち上がる瞬間でデータを読み取り
value=4847 # 0x12ef
#value=20479 # 0x4fff
data_list = list(value.to_bytes(2, byteorder='big' , signed=True))
value=-479 # 0xfe21
data_list += list(value.to_bytes(2, byteorder='big', signed=True))
print(data_list)
print(spi_send(spi, data_list)) # 送信、確認
while True:
value = int(input("PWM data>>"))
data_list = list(value.to_bytes(2, byteorder='big', signed=True)) # 右 PWM
print(f"{data_list[0]:X}, {data_list[1]:X}")
data_list += list(value.to_bytes(2, byteorder='big', signed=True)) # 左 PWM
print(spi_send(spi, data_list)) # 送信、確認
#
上記では、右用の20479と左用の-479の32ビットを送った後、-32768~32767の範囲でキー入力した値を、右と左に同じ値のPWMをまとめた32ビットをSPIで送信するプログラムです。
上記の
Parspberry PIのSPIマスター用コードからのPWMの情報を受け取るUMEHOSHI ITA基板側のSPIスレーブコードを以下に示します。
//UMEHOSHI ITA基板側のSPIスレーブコード(pwm_pi3ma_spi.c)
#include <xc.h>
#include <stdio.h>
#include <stdlib.h>
#include "common.h"
#include <proc/p32mx270f256b.h>
#include <sys/attribs.h>//割込み関係の定義
int reset_on_zero_sequence(int val); // ゼロが連続したときにモータなどを初期化する
void set_PWM(int16_t right_pwm, int16_t left_pwm ); // 右と左のPWMデータをセット
#define LEN 4
int slv_req_idx=1; // 次に要求する識別番号
uint8_t datas[LEN]={0,0,0,0};// 受信データ記憶域
void SPI2_Slave_func(void)// スレーブ用割り込み処理から呼ばれる
{
/* ---- 受信割り込み ---- */
if (IFS1bits.SPI2RXIF)// SPI2RXIF = 受信バッファにデータが入った
{
//_send_hex_low(TMR2); // 確認用
//_send_hex_low(PR2); // 確認用
//_send_hex_low(IEC0bits.T2IE ); // 確認用
//_send_hex_low(T2CONbits.ON); // 確認用
//_send_string("\r\n"); // 確認用
uint8_t val;
val = SPI2BUF; // SPI受信データを読む(読まないとSPIROVのオーバーフローが発生)
// 前に要求した識別番号を得てそれが示す受信データとして格納
if( slv_req_idx == 0) {
datas[LEN -1] = val; // バッファの最後に要求した受信データを格納
} else {
datas[slv_req_idx -1] = val;// 要求した受信データを格納
}
// 次に要求するデータを記憶する添え字に更新
slv_req_idx ++;
if( slv_req_idx == LEN ){
slv_req_idx = 0;
}
if( reset_on_zero_sequence(val) ) {// ゼロが連続したときの初期化
slv_req_idx = 1;// 初期化要求なら次の要求番号を1
SPI2BUF = slv_req_idx;// 次の送信データをセット
IFS1bits.SPI2RXIF = 0; // 受信割り込みフラグクリア
return;
}
while(SPI2STATbits.SPITBE == 0); // 送信バッファ空待ち
SPI2BUF = slv_req_idx;// 次の送信データをセット
// バッファに溜まった情報をデコードしてPWMデータに戻す。
if (slv_req_idx == 1){// PIC32はリトルエンディアンに合わせてデコード
int16_t right_pwm= ((uint16_t)datas[0] << 8) | datas[1];
int16_t left_pwm = ((uint16_t)datas[2] << 8) | datas[3];
set_PWM(right_pwm, left_pwm );// 右と左のPWMデータをセット
}
IFS1bits.SPI2RXIF = 0; // 受信割り込みフラグクリア
}
/* ---- エラー割り込み ---- */
if (IFS1bits.SPI2EIF)
{
SPI2STATbits.SPIROV = 0; // 受信オーバーフロー解除
slv_req_idx = 1;
SPI2BUF = slv_req_idx;// 次の送信データ先頭用にセット
IFS1bits.SPI2EIF = 0; // エラーフラグクリア
_debug_hex16(9, 0x0ffff , 1);
}
}
int reset_on_zero_sequence(int val) // ゼロが連続したときにモータなどを初期化する
{
static int zero_count=0;// 初期化判定用 0のbyteを連続5個受け取りで初期化
if( val == 0){ // zero の連続5個受信で、次の受信を先頭データと初期化
zero_count++;
if( zero_count == 5){
zero_count = 0;
// モータ全停止
OC4RS = 0; // CN7[3-4]制御(正転情報)(RB13)
OC3RS = 0; // CN7[1-2]制御(逆転情報)(RB14)
OC5RS = 0; // CN6[1-2]制御(正転情報)(RB2)
OC1RS = 0; // CN6[3-4]制御(逆転情報)(RB3)
_debug_hex8(8, 0, 1); // 16ビット受信データ確認
return 1;
}
} else zero_count = 0;
return 0;
}
void set_PWM(int16_t right_pwm, int16_t left_pwm )// 右と左のPWMデータをセット
{
_send_decimal(right_pwm,10);// _send_hex_low(right_pwm); // 確認用
_send_string(": right_pwm , "); // 確認用
_send_decimal(left_pwm,10); // _send_hex_low(left_pwm); // 確認用
_send_string(": left_pwm \r\n"); // 確認用
//_clear_beep_code(); //デバック用ビープ領域初期化
//_debug_hex16(0, right_pwm , 1); // 16ビット受信データ確認
//_debug_hex16(1, left_pwm , 1); // 16ビット受信データ確認
//OC4RS = 0;//0x3fff; 実験用コード
if(right_pwm >= 0){
OC4RS = right_pwm; // CN7[3-4]制御(RB13)
OC3RS = 0x0; // CN7[1-2]制御(RB14)
} else {
OC4RS = 0x0; // CN7[3-4]制御(RB13)
OC3RS = -right_pwm;; // CN7[1-2]制御(RB14)
}
if(left_pwm >= 0){
OC5RS = left_pwm; // CN6[1-2]制御(RB2)
OC1RS = 0x0; // CN6[3-4]制御(RB3)
} else {
OC5RS = 0x0; // CN6[1-2]制御(RB2)
OC1RS = -left_pwm; // CN6[3-4]制御(RB3)
}
}
// UMEHOSHI ITA のRAMプログラムの設定用プログラム(0x80005000番地より起動)
__attribute__((address( 0x80005000 ))) void start (void);
void start()
{
//__builtin_disable_interrupts();// PIC32MX270F256B-50I/SPの割り込みをまとめて一括禁止(Disable)
// これは、コンパイラ(XC32)の組み込み関数(Built-in Function) 「asm volatile ("di");」でも良い
_clear_beep_code(); // _debug_hex? 関数利用の初期化
_UM_PTR_GOTO_BEEP = NULL; // debug_hex?の出力をループしない設定
_set_pwd_mode(1); // PWM モードへ変更( SPI2の初期化の前に行う。そうしないとPWMが動かない:理由不明)
_HANDLES[_IDX_SPI2_FUNC] = (void *)SPI2_Slave_func;// 上記のSPI割り込み関数の登録
((void (**)(void) )_PTR_HANDLERS)[_IDX_INIT_SPI2_SLAVE]();// SPI2の初期化
slv_req_idx=1; // 最初設定
SPI2BUF = slv_req_idx;// 最初の送信データのセット(重要)
_RB5 = 0; // D1 LED の消灯
T2CONbits.ON = 1; //Timer2の機能を有効(PWM利用ではこの有効設定が必要)
PR2=0x09c3F; // Timer2の周期設定
//IEC0bits.T2IE = 0; // Timer2 Interrupt Enable を 0 (禁止) にする。(割り込み必要無し)
//OC4RS = 0x1fff; //CN7のPWMの値設定確認用
//_debug_hex4(0,slv_req_idx,1);// _debug_hex? の動作確認用
//_send_string("start END\r\n");//起動関数終了の表示
//__builtin_enable_interrupts();// PIC32MX270F256B-50I/SPの割り込みをまとめて一括許可(Enable)
// 上記は、組み込み関数(asm volatile ("ei");でも良い
}
以下は上記SPI送受信の実行計です。左に合わせて右は改行や説明などを追加しています。
| Raspberry PI側のPythonのSPIマスター実行例 | PIC32MXの実行例(「umehoshiEdit」ツールでの表示) |
|---|---|
suzuki@raspberrypi:/usr/local/apps $ sudo python spimaslist.py [18, 239, 254, 33] ← 送信予定のリスト send[0]:18,receive: 1 ←18が1byte送信で、1の受信が要求番号 send[1]:239,receive: 2 ←1の受信で、send[1]の239の1byteを送信 send[2]:254,receive: 3 send[3]:33,receive: 0 True PWM data>>0 ← 以降はキー入力データを送信(0のPWMはモータ停止) 0, 0 send[0]:0,receive: 1 send[1]:0,receive: 2 send[2]:0,receive: 3 send[3]:0,receive: 0 True PWM data>>-32768 ← このキー入力値はモータの正転の最大値 80, 0 send[0]:128,receive: 1 send[1]:0,receive: 2 send[2]:128,receive: 3 send[3]:0,receive: 0 True PWM data>>32767 7F, FF send[0]:127,receive: 1 send[1]:255,receive: 2 send[2]:127,receive: 3 send[3]:255,receive: 0 True PWM data>>0 0, 0 send[0]:0,receive: 1 send[1]:0,receive: 2 send[2]:0,receive: 3 send[3]:0,receive: 0 True PWM data>> |
START:80005000 ← 起動の表示(80005000番地より実行)
+4847: right_pwm , -479: left_pwm ←32bit受信でモータが回る
0: right_pwm , 0: left_pwm ←0の受信でモータが停止
-32768: right_pwm , -32768: left_pwm ←この受信値はモータ正転最大
+32767: right_pwm , +32767: left_pwm ←この受信値はモータ逆転最大
0: right_pwm , 0: left_pwm ←0の受信でモータが停止
|
umeusb.send_cmdfile("/usr/local/apps/pwm_pi3ma_spi.c.umh") # SPIでPWM送信するモジュールを初期化
#!/usr/bin/python3
# -*- coding: utf-8 -*-
# ssd1306.py のファイル名で、ssd1306を使った128×64ドット有機ELディスプレイをI2Cで操作するdraw_text関数の定義
# 利用する場合、『from SSD1306 import i2c, draw_text』 を記述して使うとよい。
import board
import busio
from adafruit_ssd1306 import SSD1306_I2C # SSD1306ディスプレイ用
from PIL import Image, ImageDraw, ImageFont
import time
i2c = busio.I2C(board.SCL, board.SDA)# --- I2C初期化 ---
# --- SSD1306ディスプレイ初期化 (128x64の場合) -----------
oled = SSD1306_I2C(128, 64, i2c)
oled.contrast(128) # 0?255
oled.fill(0) # --- クリア
oled.show() # ---表示
# --- Pillowで描画領域を作成 ---
image = Image.new("1", (oled.width, oled.height))
draw = ImageDraw.Draw(image)
font = ImageFont.load_default()# --- フォント設定 ---
def draw_text(txt: str, row=0, showFlag = True, newImageFlag = False, font=font, fill=255):
'''txtの文字列を、row行目に設定する。
showFlagをFalseにすると表示はしないで、次の表示に使うイメージに内部を更新する。
newImageFlagをTrueにすると、以前の描画イメージをクリアして、新しい文字列として更新する。
'''
global image,draw
if newImageFlag:
image = Image.new("1", (oled.width, oled.height)) # イメージ作り直し(全体クリア)
draw = ImageDraw.Draw(image)
# --- テキスト描画 (0=黒、255=白)上記設定で、横21文字---
draw.text((0, row*15), txt , font=font, fill=255)
# --- 画面に表示 ---
oled.image(image)
if showFlag: oled.show()
if __name__ == '__main__':
draw_text(f"UMEHOSHI ITA",0,showFlag=False,newImageFlag=True)
draw_text(f"123456789ABCDEFGHIJKLMN",1,showFlag=False)
draw_text(f"SSD1306 Display",2)
|
 |
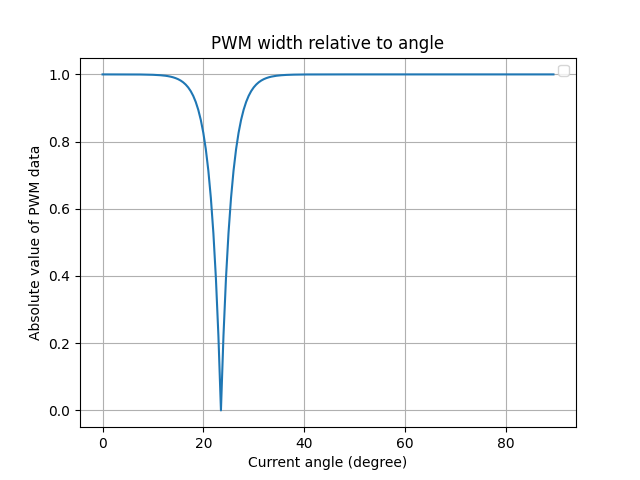
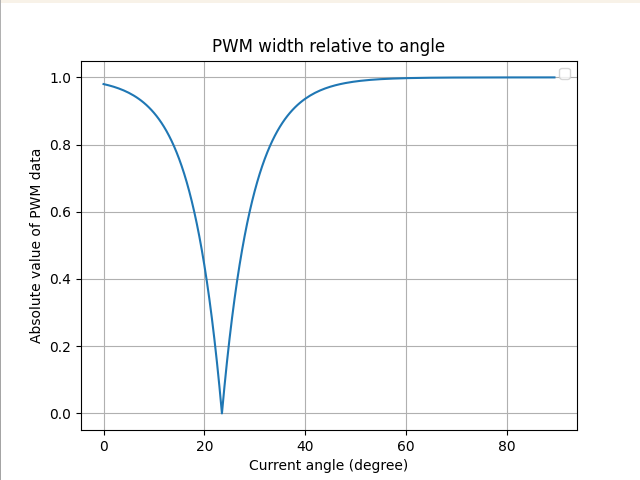
import math
# test_pwmexp.py PWMの幅と角度の関係の検討用
# 「現在と目標角の角度の差」を引数にモータを制御する関数
def update_motor_by_angle(current_angle:float, target_angle:float):
max_pwm = 0x7fff # PWM設定の最大値
cr=2 # 時定数
dir='F'
if current_angle < target_angle: # 逆回転
dir='B'
value = int(max_pwm * (1-math.exp(-(target_angle-current_angle)/cr)))
pwm_list = list( (-value).to_bytes(2, byteorder='big', signed=True))
else: # current_angle >= target_angle 正回転
value = int(max_pwm * (1-math.exp(-(current_angle-target_angle)/cr)))
pwm_list = list( value.to_bytes(2, byteorder='big', signed=True))
#spi_send(spi, pwm_list * 2 ) # PWM送信(左右共通値)
return value, dir
import numpy as np
import matplotlib.pyplot as plt # pltを使うこと
target_angle=23.5 # 目標角度
xs = np.arange(0, 90 , 0.5)
ys = []
for x in xs:
y,div=update_motor_by_angle(x, target_angle)
ys.append( y/0x7fff )
fig = plt.figure() # ◎ファイル保存の準備
plt.plot(xs,ys)
plt.xlabel("Current angle (degree)")
plt.ylabel("Absolute value of PWM data")
plt.title("PWM width relative to angle")
plt.legend() # グラフ内にも上記のlabel表示をつける
plt.grid() # グリッドの表示
fig.savefig("img.png")# ◎表示イメージのファイル保存
plt.show() #画面に表示して閉じるまで待つ(表示表示されると、plt内容はクリア)
#!/usr/bin/python3
# -*- coding: utf-8 -*-
# [Raspberry Pi 3 Model A+]と[UMEHOSHI ITA]を乗せたモータ付き台車のraspipwmspi.pyから呼び出される
# 倒立振子をPWM制御で使われる走行判定モジュール detector2.py
# 前進中か後進中の移動中を判断を、波の勾配(微分値)を使って判断すし、目標角の補正値を取得するクラス
# 一つのキューを同じサイズの2つのキューで実現することで、前半に格納されるキューと、後半に格納されるキューに記憶
# 記憶されるデータ群で、傾きを判断して、山か谷かを判定している。
# キューへ追加はappend(データ)メソッドで行い、その都度に前半と後半それぞれの合計をsum_formerとsum_latterを記憶して、
# 傾きを計算している。
# appendの戻り値で、前進中か後進中を判断、倒立目標角度を調整するたも角度を返す。
from collections import deque
class Detector2:
def __init__(self, size: int = 6):
self.dq_former = deque()# 前半の値を保持する変数(データはこちらからを入れる。注意:最新情報はこちら)
self.dq_latter = deque()# 後半の値を保持する変数(注意:キューなのでこちらが時間的に前になる)
self.size = size
# 前半と後半の合計値を保持する変数
self.sum_former = 0.0 # 「差分更新(スライディング・ウィンドウ)」という手法で合計を求める
self.sum_latter = 0.0
self.prev_valley = 0 # 前の谷の値
self.rtnVal = 0 # 戻り値となる目標角度の補正値
self.isValley = False # もう一つの戻り値で谷の判定でTrue
self.change_flag = True # 谷の頂点と判断した時、1回だけTrueとするための制御用
#
def append(self, data: float) -> float:
# 前進中か後進中を判断、倒立目標角度を調整するたも角度と、谷と判断した時にTrueを返す。
self.dq_former.append(data) # 新しいデータを最後に追加
self.sum_former += data
if len(self.dq_former) <= self.size:
return 0,False
# 以下は前半のキューが一杯になった後の追加処理
removed = self.dq_former.popleft() # 前半の先頭の追い出し
self.sum_former -= removed
self.dq_latter.append(removed) # データを後半キューに移動
self.sum_latter += removed
# 後半キューが一杯になるまでの処理
if len(self.dq_latter) <= self.size:
return 0,False # 後半キューが一杯になっていない。
removed = self.dq_latter.popleft() # 後半キューの先頭の追い出し
self.sum_latter -= removed
#
# -----以下は前半と後半が一杯になった以降の処理になる------
tilt_former = self.dq_former[-1]-self.dq_former[0] # 最近の傾き
tilt_latter = self.dq_latter[-1]-self.dq_latter[0] # 直前の傾き
peak_flag = tilt_latter > 0 and tilt_former < 0 # 山の頂点
valley_flag = tilt_latter < -0.07 and tilt_former > 0.07 # 谷の頂点
if abs(self.sum_former-self.sum_latter) > 2: # 頂点でないと判断を修正
peak_flag = False
valley_flag = False
#
# print(f"self.sum_former-self.sum_latter:{self.sum_former-self.sum_latter}") # 2つのキューの合計比較
self.isValley=False
if peak_flag : # -------------------上に山の変曲点
self.change_flag = True
elif valley_flag : # -------------------下に谷の変曲点
if self.change_flag :
self.change_flag = False
if self.prev_valley != 0 and data>self.prev_valley+1: # 谷の変曲点が以前が上がっている?
#self.rtnVal = -2.0 # 後進と判断した時の補正値
self.rtnVal = (self.prev_valley-data) # 負の値
elif self.prev_valley != 0 and data<self.prev_valley-1: # 谷の変曲点が以前が下がっている?
#self.rtnVal = 2.0 # 前進と判断した時の補正値
self.rtnVal = (self.prev_valley-data) # 正の値
else: self.rtnVal = 0
#
self.prev_valley = data
self.isValley=True
#
self.prev_valley = data # 谷の頂点を記憶を比較のために記憶
#
return self.rtnVal, self.isValley
#
def sum_tilt_former(self):
return self.dq_former[-1]-self.dq_former[0] # 最近の傾き
if __name__ == '__main__':
import matplotlib.pyplot as plt
# テスト
detector = Detector2(size=6)
def pitch_txt_load():
with open('../log2.txt', 'r') as fr: # ロボット動作の制御ログ情報
#with open('log20260410.txt', 'r') as fr: # ロボット動作の制御ログ情報
lines = fr.readlines()
tims = [] # 横軸(倒立角度の想定時間)
pitchs = [] # 倒立角度の測定値
ajvs = [] # 前進・後進を判定し、その結果情報(Adjustment values)
timing=0
for s in lines:
items = s.split(",")
if not (items[0][0] in ['F','B','S']): continue
v = items[1][len("pitch:"):]
pitchs.append(float(v))
#
ajv, b = detector.append(float(v)) # ファイルから判定器してから取得()
#ajv = float(items[4][len("ajv:"):]) # 判定器を使った実行結果のファイルより取得
#
ajvs.append(ajv) # 調整値(判定値
#
v = items[2][len("periodo:"):]
timing += float(v)
tims.append(timing)
return tims,pitchs,ajvs
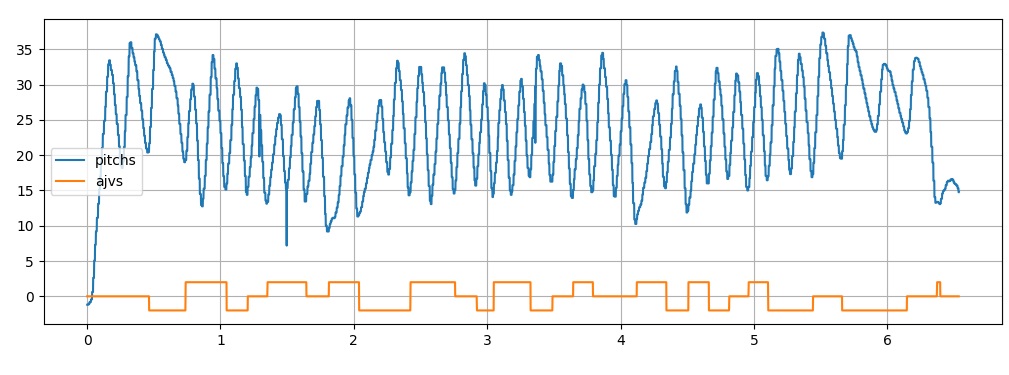
tims, pitchs, ajvs = pitch_txt_load()
fig = plt.figure() # ◎ファイル保存の準備
plt.plot(tims, pitchs,label="pitchs")
plt.plot(tims, ajvs,label="ajvs")
plt.legend() # グラフ内にも上記のlabel表示をつける
plt.grid() # グリッドの表示
fig.savefig("img.png")# ◎表示イメージのファイル保存
plt.show() #画面に表示して閉じるまで待つ
上記は、倒立時の倒立角度からその振動の谷の角度値の変化で判断するコードで、
±2.0の戻り値を利用してグラフ化したが、
最終的に黄色マークののように「前の谷の角度値-前の谷の角度値」を戻り値にして、
利用側のこの値を調整量の基準で使えるように変更した。
#!/usr/bin/python3
# -*- coding: utf-8 -*-
# [Raspberry Pi 3 Model A+]と[UMEHOSHI ITA]を乗せたモータ付き台車のサービスから呼び出される
# 倒立振子をPWM制御で試すコード raspipwmspi.py
import os # ファイル有無を調べるため追加 ★
import spidev
import time
import math
import socket
import umetcp
import umeusb
from ssd1306 import i2c, draw_text
import threading
import subprocess
from detector2 import Detector2
def spi_send(spi: spidev.SpiDev, datas: list):
# spiで、listのbyte列を送る。 (送信成功で、Trueを返す)
mas_req_idx:int=0 # 要求されたデータの添え字
last_idx = len(datas)-1
fail_count=0
while True:
send_data = datas[mas_req_idx]
rec_data = spi.xfer2([send_data])[0] # 1byte送受信
# print(f"send[{mas_req_idx}]:{send_data},receive: {rec_data}")
if rec_data > last_idx: return False # スレーブから想定外の受信
if rec_data == mas_req_idx: # 受信エラーと判断し、先頭から送り直す。
print(f"----- Error rec_data:{ rec_data }")
mas_req_idx = 0
fail_count+=1 # 失敗数カウント
if fail_count > 5: return False # 送信失敗
time.sleep(0.001) # チョット待つ
continue
if mas_req_idx == last_idx: return True # 送信成功終了
mas_req_idx = rec_data # 次のデータの添え字に更新
#
#
spi = spidev.SpiDev() # SPI操作オブジェクト生成
spi.open(0, 0) # bus=0 device=0 (CE0) でSPIオープン
spi.max_speed_hz = 7812500 # 7.8 MHzSPIクロック
spi.mode = 0 # クロック信号(SCLK)はLow待機、LowからHighに立ち上がる瞬間でデータを読み取り
'''
value=0x0123
pwm_list = list(value.to_bytes(2, byteorder='big', signed=True))
spi_send(spi, pwm_list * 2 ) # PWM送信、確認
'''
# 「現在と目標角の角度の差」を引数にモータを制御する関数
def update_motor_by_angle(current_angle:float, target_angle:float):
max_pwm = 0x7fff # PWM設定の最大値
#cr=2 # 時定数
cr=6 # 時定数 に変更
dir='F'
if current_angle < target_angle: # 逆回転
dir='B'
value = int(max_pwm * (1-math.exp(-(target_angle-current_angle)/cr)))
pwm_list = list( (-value).to_bytes(2, byteorder='big', signed=True))
else: # current_angle >= target_angle 正回転
value = int(max_pwm * (1-math.exp(-(current_angle-target_angle)/cr)))
pwm_list = list( value.to_bytes(2, byteorder='big', signed=True))
spi_send(spi, pwm_list * 2 ) # PWM送信(左右共通値)
return value, dir
# umeusb.send_cmdfile("/usr/local/apps/uStartInit.umh") # ロボット初期化("R009D020010004E")
# umeusb.send_cmdfile("/usr/local/apps/pwm_pi3ma_spi.c.umh") # ロボット初期化("R009D020010004E")
server_addr =(umetcp.get_wlan0_ip(), 59154)
hostname=socket.gethostname()
def info_show2( pitch , target_angle):
''' IPアドレスpとポート番号の情報と、ピッチ角度、目標角度をSSD1306ディスプレイに表示する'''
draw_text(f"{server_addr[0]},{server_addr[1]}",0,showFlag = False, newImageFlag = True)
draw_text(f"Pitch:{pitch:5.1f} {target_angle}",2,showFlag = True)
# ---- LED用の出力とタクトスイッチ用入力 のためのGPIO初期化-----
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(21, GPIO.OUT) # GPIO21を出力に設定
GPIO.output(21, GPIO.HIGH) # ON(3.3V)
for no in [6, 16, 17]:
GPIO.setup(no, GPIO.IN, pull_up_down=GPIO.PUD_UP) # プルアップ付き入力
#------ GPIO初期化 終了 -------------------------------------
# 9軸センサー BNO055 制御 ---------------------------------------------------
import smbus # I2C通信をPythonから簡単に扱うためのモジュール
# BNO055 の初期化
BNO055_ADDRESS = 0x28 # BNO055のI2Cアドレス(ADRピンがGNDなら0x28、VDDなら0x29になります)
BNO055_OPR_MODE = 0x3D # 動作モードを設定するためのレジスタ
BNO055_EULER_H_LSB = 0x1A # オイラー角(方位・ロール・ピッチ)のデータが始まるアドレス
bus = smbus.SMBus(1)# 引数の1でRaspberry PiのボードGPIO2: SDA、GPIO3: SCLを指定
bno055_calib_bin_path="/usr/local/apps/bno055_calib.bin" # キャリブレーションデータファイルパス
# このキャリブレーションデータファイルが存在しなければ、作成する。
try:
os.stat(bno055_calib_bin_path) # ファイルが存在しない場合は、エラー
except OSError:
bus.write_byte_data(BNO055_ADDRESS, BNO055_OPR_MODE, 0x00) # 設定変更(OPR_MODE)でCONFIGモードに切り替える
time.sleep(0.05)
# センサーをリセット(0x3FのSYS_TRIGGERレジスタのビット7をセット)
bus.write_byte_data(BNO055_ADDRESS,0x3F, 0x20)
time.sleep(0.7) # リセット後は再起動まで時間がかかる
# 出力単位(UNIT_SEL)を設定(0x00で「角度=度(°)」単位)
bus.write_byte_data(BNO055_ADDRESS,0x3B, 0x00)
# センサーフュージョンを有効にするNDOFモードに変更
bus.write_byte_data(BNO055_ADDRESS,BNO055_OPR_MODE, 0x0C) # NDOFモードへ
time.sleep(0.05)
while True: # NDOFモードで全てのセンサー(SYS, GYR, ACC, MAG)が 3 になるまで動かす。
cal = bus.read_byte_data(BNO055_ADDRESS, 0x35)
sys = (cal >> 6) & 0x03
gyr = (cal >> 4) & 0x03
acc = (cal >> 2) & 0x03
mag = (cal >> 0) & 0x03
draw_text(f"bno055 NDOF Calibrating...",0, showFlag = False,newImageFlag = True) # キャリブレーションの開始
draw_text(f"SYS:{sys}, GYR:{gyr}, ACC:{acc}, MAG:{mag}", 1)
time.sleep(0.5)
if sys == 3 and gyr == 3 and acc == 3 and mag == 3 : break # キャリブレーション完了?
# 各値が 3 になれば完全キャリブレーション完了です
#
calib_data = bus.read_i2c_block_data(BNO055_ADDRESS, 0x55, 22)
with open(bno055_calib_bin_path, "wb") as f:
f.write(bytearray(calib_data)) # オフセット値を読み出して保存
#
draw_text(f"End Calibration",2) # キャリブレーションデータファイル作成終了
# オフセット調整(センサーの取り付け位置や方向を自動補正)
bno055_offset_path="/usr/local/apps/bno055_offset.txt"
# 上記ファイル内に X軸が北を向く時にHeading、水平に置いた時にRollと Pitchが記憶される
make_offset_mode=False # "bno055_offset.txt"オフセット調整ファイル作成モード
try:
with open(bno055_offset_path, "r") as fr:
s = fr.readline() # 一行読み取り(改行を含めて)
draw_text(f"bno055 offset setting",0,newImageFlag = True)
a = s.split(",")
heading_offset = float(a[0]) # オフセット調整値取得
roll_offset = float(a[1])
pitch_offset = float(a[2])
print(f"offset value heading:{heading_offset}, roll:{roll_offset}, pitch:{pitch_offset}")
except:
make_offset_mode = True # bno055_offset.txtのオフセット調整作成モード
bus.write_byte_data(BNO055_ADDRESS, BNO055_OPR_MODE, 0x00) # 設定変更(OPR_MODE)でCONFIGモードに切り替える
time.sleep(0.05)
with open(bno055_calib_bin_path, "rb") as f:
calib_data = list(f.read(22)) # 別途bno055_calib_write.pyで行ったキャリブレーションの記憶ファイルを読む
# 設定モードへ
bus.write_byte_data(BNO055_ADDRESS, 0x3D, 0x00)
time.sleep(0.025)
# キャリブレーションデータを書き込んで、調整情報を復元
bus.write_i2c_block_data(BNO055_ADDRESS, 0x55, calib_data)
# NDOFモードに戻す
bus.write_byte_data(BNO055_ADDRESS, 0x3D, 0x0C)
time.sleep(0.05)
# 出力単位(UNIT_SEL)を設定(0x00で「角度=度(°)」単位)
bus.write_byte_data(BNO055_ADDRESS,0x3B, 0x00)
def to_signed(val):
"""16ビット値を符号付き整数に変換"""
if val >= 0x8000:
val -= 0x10000
return val
prev1_Pitch = 0 # 前のPitchの測定値
prev2_Pitch = 0 # 前のPitchの測定値
prev3_Pitch = 0 # 前のPitchの測定値
def read_euler():
''' make_offset_modeがTrueの場合は、現在の
heading:左右への向き, roll:左右の傾き, pitch:上下の傾きを返す。
make_offset_modeがFalseの場合は、調整過程のheading, roll, pitchを返す'''
#
global prev1_Pitch,prev2_Pitch,prev3_Pitch # 前のPitchの測定値
data = bus.read_i2c_block_data(BNO055_ADDRESS, BNO055_EULER_H_LSB, 6)
# 各要素が 1 バイト(0~255)の整数を6個のリストで得られる。(1 LSB = 1/16 度)
# データはリトルエンディアン形式(下位→上位の順)
heading = (data[1] << 8) | data[0] # 方位角(北基準のYAW)
roll = (data[3] << 8) | data[2] # ロール角(左右の傾き)
pitch = (data[5] << 8) | data[4] # ピッチ角(前後の傾き)
# ロールとピッチは符号付き
roll = to_signed(roll)
pitch = to_signed(pitch)
# スケーリング(1 LSB = 1/16 度)
heading = heading / 16.0 #
roll = roll / 16.0
pitch = pitch / 16.0
if make_offset_mode == False: #オフセット調整処理
# X軸が北を向く時にHeadingが0、水平に置いた時にRollと Pitchが0になるオフセット調整
heading = heading - heading_offset # headingズレ補正
heading = heading if heading >= 0 else heading + 360
roll = roll - roll_offset # rollズレ補正
if roll > 90:
roll = -(90 - roll)
elif roll < -90:
roll = -(-90 - roll)
pitch = pitch - pitch_offset # pitchズレ補正
if pitch > 180:
pitch = -(360 - pitch)
elif pitch < -180:
pitch = -(-360 - pitch)
#
prev3_Pitch = prev2_Pitch # 前の測定値記憶
prev2_Pitch = prev1_Pitch # 前の測定値記憶
prev1_Pitch = pitch # 前の測定値記憶
return heading, roll, pitch # 左右への向き, 左右の傾き, 上下の傾きを返す
if make_offset_mode: #オフセット調整処理
count = 100 # ロボットを水平にしてはX軸が北を向いてから安定に必要な予想回数
while True:
h, r, p = read_euler()
print(f"Heading: {h:7.2f}, Roll: {r:7.2f}, Pitch: {p:7.2f}")
count -= 1
print(f" {count}が0になるまでに、ロボットを水平にしてはX軸が北を向くように置いてください。")
draw_text(f"Before CountReaches 0",0,showFlag = False, newImageFlag = True)
draw_text(f"Place it horizontally",1,showFlag = False)
draw_text(f" and point it north",2,showFlag = False)
draw_text(f" count:{count}",3)
time.sleep(0.2)
if count <= 0:
with open(bno055_offset_path, "w") as fw:
fw.write(f"{h},{r},{p}\n") # オフセット調整データ書き込み
heading_offset, roll_offset,pitch_offset=h,r,p
break # 上記でX軸が北を向く時にHeading、水平に置いた時にRollと Pitchを記憶
# VL53L1X使用 レーザー測距センサー-----------------------------------------------------
import adafruit_vl53l1x # VL53L1X使用 レーザー測距センサーモジュール用
# オープンソースハードウェアの設計・製造・販売を行うアメリカの企業のAdafruit(エイダフルート)モジュール利用
vl53 = adafruit_vl53l1x.VL53L1X(i2c)# VL53L1X使用 レーザー測距センサーモジュール初期化
print("VL53L1X Start measuring...")
vl53.start_ranging()
distance = vl53.distance
time.sleep(0.5)
print(f"Distance: {distance} mm")
def save_results(results, last_str): # 結果保存用
with open('/usr/local/apps/log2.txt', 'w') as fw:
for t in results:
fw.write(f'{t[0]}:{t[1]},pitch:{t[2]},periodo:{t[3]},avg:{t[4]},ajv:{t[5]}\n')
fw.write(last_str)
# # ピッチなどの計測と、その制御ループ----------------------------------------------------------
measure_loop_flag=True # ピッチなどの計測と、その制御ループを続けるためのフラグ
def measure_loop():
global measure_loop_flag # 測定監視ループフラグ
next_measure_time=0 # 測定間隔制御用(次の測定の時間を記憶する)
flag_push = False # 倒立制御開始ボタンが押されてから倒立制御を終えるまでTrue
flag_control = False # 倒立制御中である間だけTrue
start_control_time=0 # 制御開始の時間(秒)
start_forward_time = 0.2 # 制御開始前のモータ前進を行う期間(秒)
target_angle=23.6 # 目標角度 15→ 20→ 25← 23→23.2 23.4
results = [] # 制御履歴を残すリスト(制御終了時にファイル化)
detector = None # 変更点判定
ajv=0 # target_angleに対する調整値
pwmV=0 # モータ制御用のPWM設定値
time_now=0 # 現在の測定時間
time_bak=0 # 一つ前の測定時間
fw = None
#
while measure_loop_flag:
if GPIO.input(6) == GPIO.LOW: # SW2スイッチ(緑)が押された? リブート処理------------
measure_loop_flag=False
draw_text(f"Rebooting.",0,showFlag = True, newImageFlag = True)
time.sleep(0.01)
try: # shell=False(デフォルト)で呼び出すのが安全
#sock.close()
subprocess.run(["sudo", "reboot"], check=True)
except subprocess.CalledProcessError as e:
draw_text(f"Reboot fail.",0,showFlag = True, newImageFlag = True)
break
#
if GPIO.input(17) == GPIO.LOW: # SW4スイッチ(黒色)が押された? 制御終了-----------
flag_push = False
flag_control = False
save_results(results, last_str="End SW\n") # 結果を保存
#
if flag_push==False and GPIO.input(16) == GPIO.LOW: # 制御開始用SW3スイッチ(黄色)が押された?
time.sleep(2)
results = []
start_control_time = time.time() # 制御スタート時間
flag_push = True
detector = Detector2(size=6)
ajv = 0
#
time_now=time.time()
if next_measure_time > time_now:
time.sleep(next_measure_time-time_now)
continue # 次の周期まで待つ
next_measure_time = time_now + 0.002 # 次の測定時間を更新
#
startM=time.time()
for ck in range(3): # # ジャイロ測定処理(雑音対策の繰り返し)
heading, roll, pitch = read_euler() # ーーージャイロ測定ーーー
if pitch < 150: break # 適正と予測される値?
#
endM=time.time()
if flag_push == False : info_show2(pitch,target_angle) # 測定値の表示
#
if flag_push and flag_control == False: # 倒立制御に入る前の処理
pwmV=20479 # 0x4fff
if time.time() < start_control_time + start_forward_time: # Forward 最初の助走
spi_send(spi, list((pwmV).to_bytes(2, byteorder='big', signed=True))*2) # 前転
else: # Back 最初の倒立のための逆転
pwmV=19000 # ★ 逆転のデューティ比を小さく変更
spi_send(spi, list((-pwmV).to_bytes(2, byteorder='big', signed=True)) * 2) # 逆転
results.append( ( f'B{pwmV}', startM, pitch, endM-startM, 0, ajv ) ) # ファイル化情報
if pitch > target_angle: # 倒立角度に達した?
flag_control = True
results.append( ( f'S{0}', startM, pitch, endM-startM, 0, ajv ) ) # ファイル化情報
elif time.time() > start_control_time + start_forward_time + 0.5: # 倒立しない。
pwmV=0
spi_send(spi, list((pwmV).to_bytes(2, byteorder='big', signed=True)) * 2) # ストップ
flag_push = False
#
deadband=0
if flag_control: # 倒立振子制御中
ajv, b = detector.append(pitch) # 走行方向の判定、調整値取得
if ajv < -10: ajv = 0.0 # ★ 大きすぎる時は、異常と判断して無視
ajv *= 0.2 # ★ 目標補正値の倍率が0.5では大きいと判断し、0.2に変更
pwmV,dir=update_motor_by_angle(pitch, target_angle + ajv) # モータのPWM制御
results.append( ( f'{dir}{pwmV}', startM, pitch, endM-startM, 0, ajv ) ) # ファイル化情報
#
if pitch < 5 or pitch > 70 or startM > start_control_time + 10: #この時間で制御を終了
spi_send(spi, list((0).to_bytes(2, byteorder='big', signed=True)) * 2) # ストップ
flag_push = False
flag_control = False
save_results(results, last_str=f"End pitch:{pitch} time:{startM-start_control_time}.\n") # 結果を保存
#
#
t_id2 = threading.Thread(target=measure_loop)
t_id2.start()
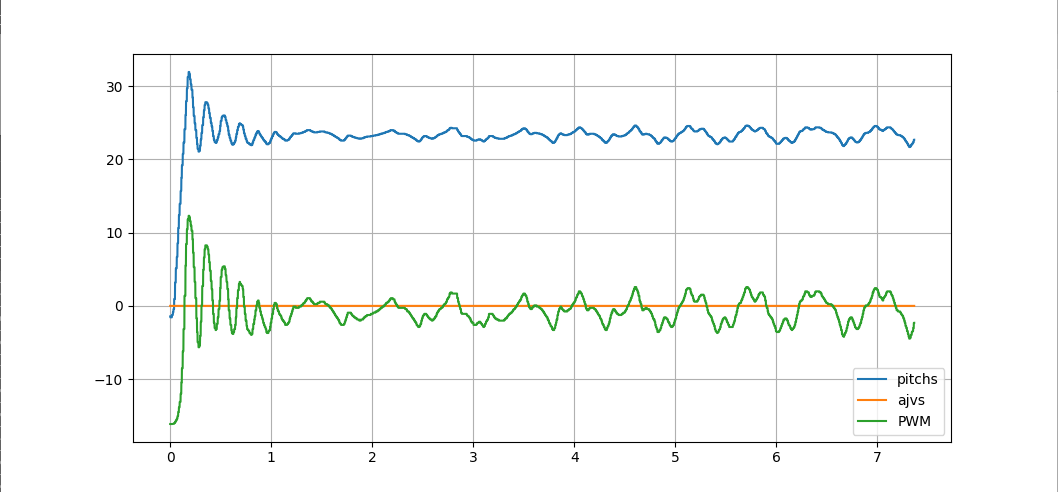
以上のコードで、
のXへの動画リンクで示すように
安定した倒立ができるようになった。| 以前の指数係数(cr=2) | 変更後の指数係数(cr=6) |
|---|---|
|  |
#!/usr/bin/python3
# -*- coding: utf-8 -*-
# TCPサーバープログラム(/usr/local/apps/raspiAPumeTest.py)
# umetcp umeusb 通信関連----------------------------------------------------
import os
import time
import umetcp
from umetcp import send_message, receiveData
import socket
import umeusb
import traceback
import signal # システムが閉じることを判断するため追加 ★
from ssd1306 import i2c, draw_text
sock = None # クライアントと通信するソケット
def exists(path):
try:
os.stat(path)
return True
except (OSError, AttributeError):
# ファイルが存在しない、またはos.statが使えない場合にFalseを返す
return False
def my_tcp_receive_file_func(filepath):
''' 受信したumehoshiアプリ用「.umh」のファイルより、
「UME専用Hexコマンド」の文字列をusbへ出力する'''
name,ext = os.path.splitext(filepath)
if not ext == ".umh" : return
with open( filepath ) as f: ss=f.readlines()
ss="".join(ss[1:])
print(ss)
umeusb.send_cmd(ss, quantity=0) # TCPで受信した 「.umh」データを[UMEHOSHI ITA]へ送る
umetcp.tcp_receive_file_func = my_tcp_receive_file_func # tcpファイル受信データの処理を置き換え
def my_tcp_recieve_message(msg):
if msg.startswith("G:"):
file_path = msg[2:]
if exists(file_path):
umetcp.send_file(sock, file_path)
else:send_message(sock, f"G:{file_path}Not Operation\n")
else: umeusb.send_cmd(msg)
umetcp.tcp_receive_message_func=my_tcp_recieve_message # TCO受信文字列(UME専用Hexコマンド)処理を置き換え
def my_usb_receive_func(bin):
'usb受信のイベントで実行するデフォルト処理'
global sock
#print("-----------",bin)
ss = bin.decode('utf-8')
a=ss.split('\n')
for s in a:
s = s.strip()
if s == "": continue
if sock != None:
print(f"USB receive:{s}")
send_message(sock, s) # [UMEHOSHI ITA]からの応答メッセージをTCPで返す
else: print( f"USB receive:{s}" )
umeusb.usb_receive_func = my_usb_receive_func # USB受信データの処理を置き換える。
umeusb.init_sub()
import threading
t_id = threading.Thread(target=umeusb.read_loop)
t_id.start()
#ip="192.168.4.1"
ip=umetcp.get_wlan0_ip() # IPアドレス取得
while ip == None:
ip=umetcp.get_wlan0_ip()
if ip : break
time.sleep(0.1)
# umeusb.send_cmdfile("/usr/local/apps/uStartInit.umh") # ロボット初期化("R009D020010004E")
umeusb.send_cmdfile("/usr/local/apps/pwm_pi3ma_spi.c.umh") # SPIでPWM送信するモジュールを初期化
server_addr =(umetcp.get_wlan0_ip(), 59154)
hostname=socket.gethostname()
print("Serverの情報:",hostname, server_addr)
draw_text(f"{server_addr[0]},{server_addr[1]}",0,showFlag = True, newImageFlag = True)
# 終了時に実行したい処理 ★
def handle_shutdown(signum, frame):
draw_text(f"Wait....",0,showFlag = True, newImageFlag = True)
time.sleep(10)
draw_text(f"Shutdown.",0,showFlag = True, newImageFlag = True)
time.sleep(0.01)
# SIGTERM(システム終了時の標準信号)を登録 ★
signal.signal(signal.SIGTERM, handle_shutdown) # ★
import raspipwmspi # PWM 制御モジュール
# TCPサーバー起動処理
try:
serversock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
serversock.bind(server_addr) # IPとポート番号を指定します
print(f"{server_addr}:接続要求を待つ")
serversock.listen()
except : serversock = None
while serversock != None:
print("接続を待って、接続してきたら許可")
sock, address = serversock.accept()#サーバの接続受け入れ
print("接続相手:",address)
try:
receiveData( sock ) # 受信ループ
except Exception as e:
print(f"例外の種類: {type(e)}")
print(f"スタックトレース: {traceback.format_exc()}")
draw_text(f"wait next",0,showFlag = True, newImageFlag = True)
sock.close()