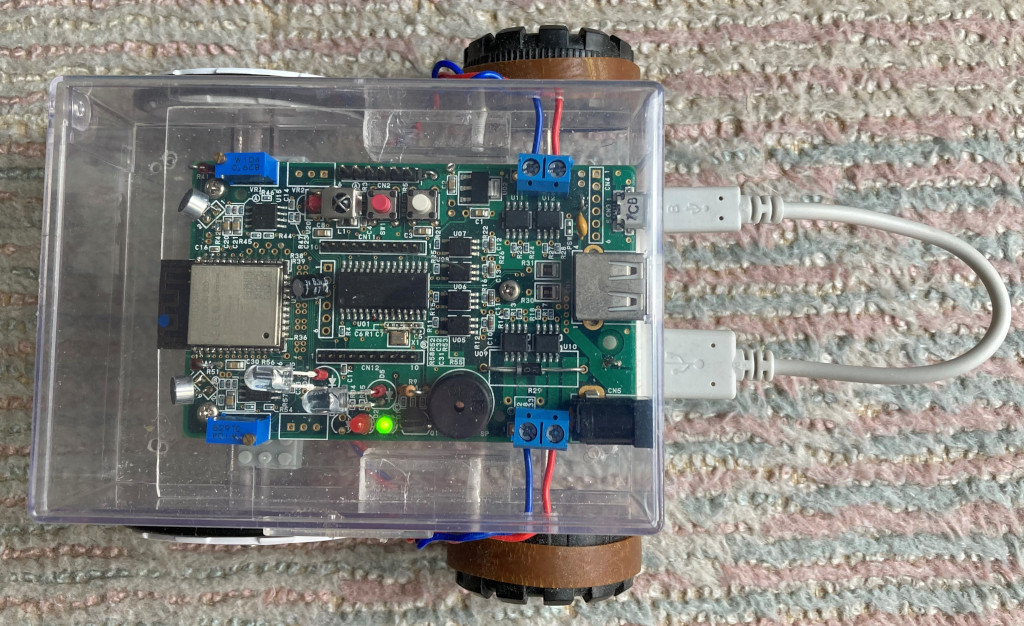
『ABS樹脂ケース(蝶番式・大) 112-TM-ABS(P-00278)』
に穴などの加工をして、
それに、
esp32を付けた基板
でesp32にMicroPython のファームウェアを書き込みしたものと、
「cheero (チーロ) CHE-061-IOT
cheero Canvas IoT機器対応モバイルバッテリー【3200mAh】ホワイト」
を収納しています。

次のようにギア付きモータを両面テープでつけています。
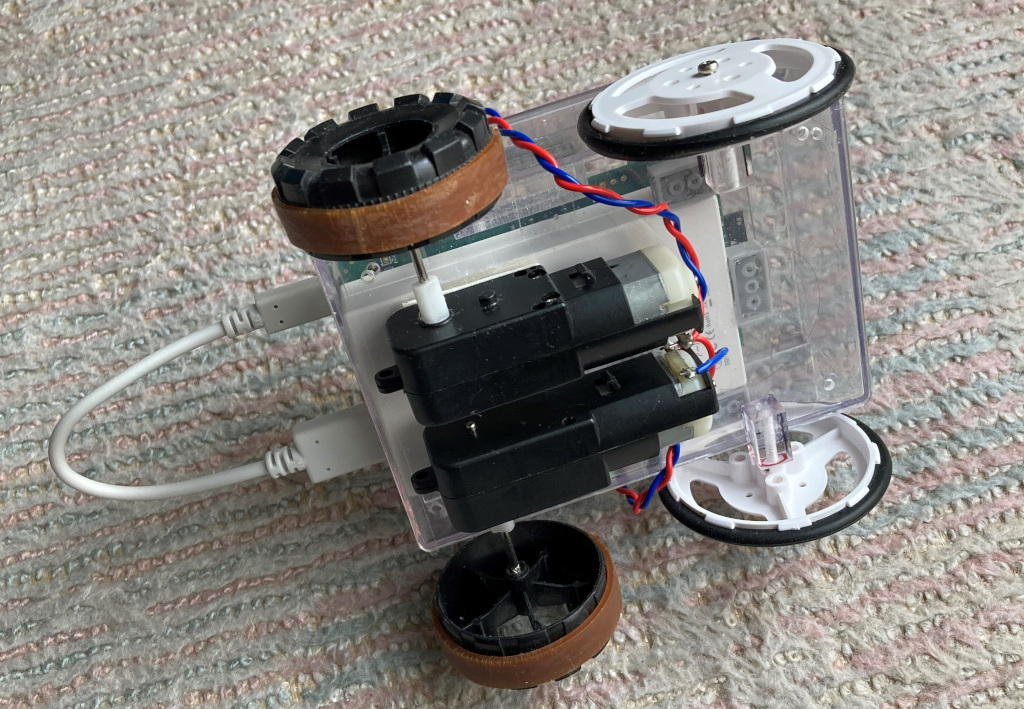
真上からのイメージです。
デフォルトの基板では、ホトカプラでモータ電源ラインは絶縁されているので、
モータ用のラインに供給できるように接続する配線が必要です。
その接続は、次の青マルのジャンパー用スルーホール(JMP3とJMP4)を半田付けします。
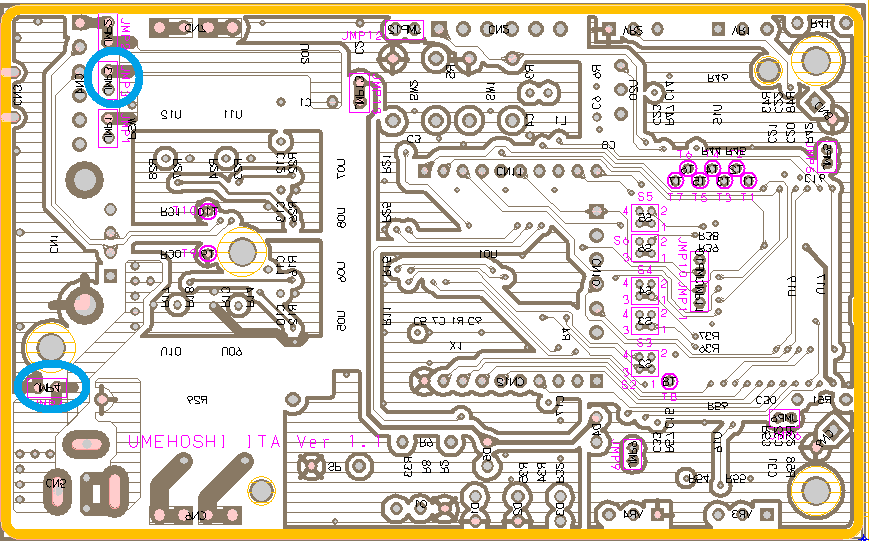
この配線により、「micro B」からのモータ用ラインにも供給されるので、このジャンパー配線を施した後、
モータを付けて動作させるコードを実行するとPCのUSB電源供給に負荷がかかります。
この変更基板の「micro B」とPCなどを接続した状態で、モータ制御は避けてください。
この構成は、PCなどのUSB接続を外して「micro B」にモバイルバッテリーだけを接続してから、モータを動かすことを想定した変更基板です。
(別途にesp32のWifiで制御できる状態して、遠隔操作でモータを動かすような使い方を行うと良いでしょう)
なお、PCと[UMEHOSHI ITA]の「USB Type-A」を接続した後で、「micro B」にモバイルバッテリーを接続する使い方があります。
この場合、PCとモバイルバッテリーの両方から電源が供給されるのですが、「USB Type-A」の方には
このページで示したようにポリスイッチを付けることによって、PCなどの電源共有側に
対する保護が働きます。
この『PCと[UMEHOSHI ITA]の「USB Type-A」を接続した後で、「micro B」にモバイルバッテリーを接続』方法は、一時的に試すことができる配慮です。
どうしてもPCとUSB接続状態で、モータ制御を試したい場合、このような構成で行えばよいでしょう。
なお当方でこのような接続の動作確認をしていますが、PC側のUSBが壊れない保証はできませんので、ご利用者の判断の上で行ってください。