埲壓偱偼丄[Raspberry PI]偲[UMEHOSHI ITA]傪USB偱愙懕偟偰丄 [Raspberry PI]懁偺python僾儘僌儔儉偱[UMEHOSHI ITA]摦偐偟傑偡丅
側偍丄[Raspberry PI]傪Wifi偺傾僋僙僗億僀儞僩偵偟偰SSH偱憖嶌偟傑偡丅
乮寢壥揑偵[Raspberry PI]傪夘偟偰丄[UMEHOSHI ITA]傪墦妘憖嶌偱偒傞傛偆偵側傝傑偡丅乯
側偍丄偙偙偱巊偭偨[Raspberry PI 3B]偺傾僋僙僗億僀儞僩傗DHCP娭楢偺僀儞僗僩乕儖椺偼丄
偙偪傜偵帵偟傑偡丅
僋儕僢僋偱
仼夋憸偑
曄傢傝傑偡
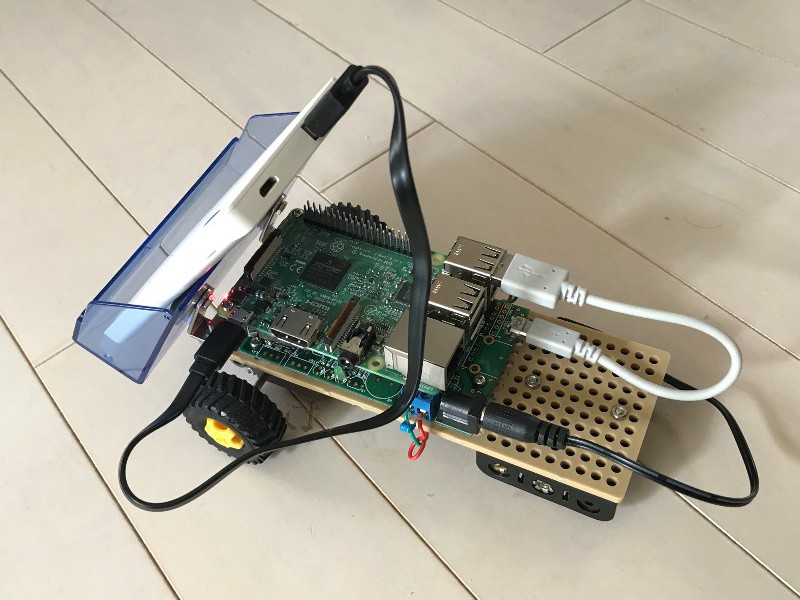
[UMEHOSHI ITA]偵廳側傞傛偆偵[Raspberry PI 3B]偑攝抲偝傟偰偄傑偡丅
儌僶僀儖僶僢僥儕乕偱[Raspberry PI 3B]傊揹尮(乣1.13A掱搙)傪嫙媼偟偰偄傑偡丅
偦偟偰丄[Raspberry PI 3B]偲[UMEHOSHI ITA]傪USB偱愙懕偟偰偄傑偡丅偙偺愙懕偼丄
捠怣傪寭偹偰[UMEHOSHI ITA]偵揹尮傪嫙媼偟偰偄傑偡丅
儌乕僞娭楢偺嫙媼偼丄幵懱掙偵偁傞扨嶰揹抮3屄偺揹抮儃僢僋僗偐傜[UMEHOSHI ITA]偵DC-JACK偱嫙媼偟偰偄傑偡丅
[Raspberry PI 3B]傪Wifi偺傾僋僙僗億僀儞僩偵偟丄摨帪偵SSH偺僒乕僶傪摦偐偟傑偡丅
SSH傪巊偭偰[Raspberry PI ]偲捠怣偟偰丄偙偺僐儞僜乕儖夋柺偱擖椡偟偨暥帤楍傪憲怣偟丄
偦偺墳摎傪庴怣偟偨PC偱暥帤楍傪昞帵偡傞椺傪帵偟偰偄傑偡丅
師偵乽umehoshiEdit僣乕儖乿偺價儖僪偱摼傜傟傞HEX僼傽僀儖傪捛壛丒曇廤偟偰丄 [UMEHOSHI ITA]偵揮憲丒幚峴傪巜帵偡傞僼傽僀儖傪嶌傝傑偡丅
偦偟偰丄偦偺僼傽僀儖揮憲偡傞Python僾儘僌儔儉椺傪帵偟偰偄傑偡丅
師偵丄儌乕僞惂屼偺僾儘僌儔儈儞僌椺偱墦妘憖嶌傪偟偰偄傞椺傪帵偟傑偡丅
windows偺python偱僉乕憖嶌傪暿儁乕僕偱徯夘偟偰偄傑偡偑丄
偦傟傪[Raspberry PI]偱峴偭偨応崌偺椺偺僾儘僌儔儉偱偡丅
壓婰偼python幚峴偼丄乽pip install pyserial乿偵傛傞僀儞僗僩乕儖偑昁梫偱偡丅
乮嶲峫丗
https://pyserial.readthedocs.io/en/latest/pyserial.html 乯
import serial
import threading
from time import sleep
serial = serial.Serial(port = '/dev/ttyACM0', baudrate = 115200)
loop_flag=True
def read_loop():
global loop_flag
while loop_flag:
b=serial.readline() # binary擖椡
print(b)
#print(b.decode('utf-8'))
if(b == b'end\r\n'):
print("push enter key")
loop_flag = False
return
# 僗儗僢僪偵 read_loop 娭悢傪搉偡
t_id = threading.Thread(target=read_loop)
# 僗儗僢僪僗僞乕僩
s = input("") # 椺乽G1080004000006C乿
t_id.start()
while loop_flag:
serial.write(s.encode('utf-8')) # byte偵曄姺偟偰弌椡
serial.write(b'\r\n')
s = input("")
serial.close()
僨僶僀僗偛偲偵僨僶僀僗梡僼傽僀儖柤偑偱偒傑偡偑丄
愙懕弴彉側偳傛偭偰柤慜傕曄傢傞働乕僗傕偁傞傛偆偱偡丅
忋婰偺USB偺僨僶僀僗柤偺'/dev/ttyACM0'偼
USB傪愙懕偟偰師偺憖嶌偱尰傟偨昞帵偐傜傛傝巊偭偰偄傑偡丅
壓婰偼丄偦偺[Raspberry PI]偲PC傪Wifi偱愙懕偟偰丄SSH偱憖嶌偟偰偄傞夋柺僀儊乕僕偱偡丅
乮乽py乿偺僼僅儖僟傪嶌偭偰丄偦偙傪僇儗儞僩僨傿儗僋僩儕偵偟偰嶌嬈偟偰偄傞椺偱偡丅乯
pi@raspberrypi:~/py $ ls -l /dev
丒丒徣棯丒丒丒
crw-rw---- 1 root dialout 166, 0 Mar 14 09:38 ttyACM0
crw-rw---- 1 root dialout 204, 64 Mar 14 09:38 ttyAMA0
丒丒徣棯丒丒丒
pi@raspberrypi:~ $
僾儘僌儔儉偺幚峴椺傪丄壓婰偱帵偟傑偡丅
僉乕擖椡偟偰Enter偟偨暥帤楍偑丄 [UMEHOSHI ITA]偵揮憲偝傟傑偡丅
[UMEHOSHI ITA]偺僨僼僅儖僩忬懺偱丄僄僐乕儌乕僪偵側偭偰偍傝丄擖椡偟偨暥帤楍偑偦偺傑傑曉怣偝傟傑偡丅
偦偟偰丄柦椷偲偟偰堄枴偑偁傞暥帤楍偱偁傟偽丄偦傟傪幚峴偟偰丄柦椷偵懳偡傞墳摎暥帤楍偑曉怣偝傟傑偡丅
埲壓偱偼丄[G1080004000006C]偺僉乕擖椡偱丄
乽80004000斣抧乿偐傜16byte偺儊儌儕椞堟傪楍嫇偝偣傞柦椷傪幚峴偝偣偰偄傑偡丅
偦偺屻[end]傪擖椡偟偰丄僾儘僌儔儉傪廔傢傜偣偰偄傑偡丅
pi@raspberrypi:~/py $ python3 sendtest.py
G1080004000006C
b'G1080004000006C\r\n'
b':108000400000F0B2009D34A6009D00000000C7580000D0\r\n'
end
b'end\r\n'
push enter key
pi@raspberrypi:~/py $
windows偱python僾儘僌儔儉偱乽UME愱梡Hex僼傽僀儖乿傪丄[UMEHOSHI ITA]偵憲怣偟偰幚峴偡傞僾儘僌儔儉傪
暿儁乕僕偱徯夘偟偰偄傑偡偑丄 偦傟傪墳梡偟偰[Raspberry PI]偱峴偭偨応崌偺椺偺僾儘僌儔儉偱偡丅
傑偢丄[Raspberry PI]偱幚峴偝偣傞乽UME愱梡Hex僼傽僀儖乿傪嶌惉偟傑偡丅
偦偺撪梕偼丄幚峴偝偣傞偲D1偺LED傪揰摂/徚摂傪媡揮偝偣丄徚摂帪偵儌乕僞傪ON偵偡傞僾儘僌儔儉偱偡丅
傑偨丄儌乕僞NO/OFF偵墳偠偰懳墳偡傞暥帤楍(start/stop)傪弌椡偡傞僾儘僌儔儉椺偱丄師偺僾儘僌儔儉偱偡丅
偙傟偼丄window懁偺乽umehoshiEdit僣乕儖乿偱僾儘僌儔儉偟偰偟傑偡丅
#include <xc.h>
#include <stdlib.h>
#include "common.h"
__attribute__((address( 0x80005000 ))) void test (void);
void test()
{
_RB15 = ! _RB15;// 弌椡傪斀揮 仛
if( _RB15 == 0 ){
// CN7偺[1-2]偵懳墳偡傞RB14傪0丄[3-4]偵懳墳偡傞RB13傪1偵偡傞丅
// CN6偺[1-2]偵懳墳偡傞RB2傪0丄[3-4]偵懳墳偡傞RB3傪1偵偡傞丅
PORTBCLR = 0b0100000000000100;// RB14,RB2傪0
PORTBSET = 0b0010000000001000;// RB13,RB3傪1
_send_string("start\r\n");
} else {
PORTBCLR = 0b0010000000001000;// RB13,RB3傪0
_send_string("stop\r\n");
}
}
偙傟傪價儖僪偟偰偊傜傟偨僐乕僪偱丄[Raspberry PI]懁偱僼傽僀儖傪嶌傝傑偡丅
埲壓偼丄[Raspberry PI]偺乽py乿僼僅儖僟傪嶌偭偨強傪僇儗儞僩僨傿儗僋僩儕偵偟偰嶌嬈偟偰偄傞椺偱偡丅
pi@raspberrypi:~/py $ nano command.txt
偛巊梡偡傞僄僨傿僞偼壗偱傕傛偄偱偡偑丄埲壓偼SSH偱乽Tera Term乿偱墦妘憖嶌傪偟偰偄傞夋柺偱丄
nano傪巊偭偰曇廤偟丄忋婰僐乕僪傪價儖僪偟偰摼傜傟偨乽UME愱梡Hex僼傽僀儖乿傛傝僐僺乕仌揬傝晅偗偟偰丄
嵟屻偵丄乽R00800050000061乿偺暥帤楍傪捛壛偱揬傝晅偗偨僀儊乕僕偱偡丅
偙傟偼[0x80005000]偺愨懳斣抧偺娭悢傪柦椷乮乽umehoshiEdit僣乕儖乿偺[Excute]儃僞儞偱摼傜傟傞暥帤楍偱偡丅
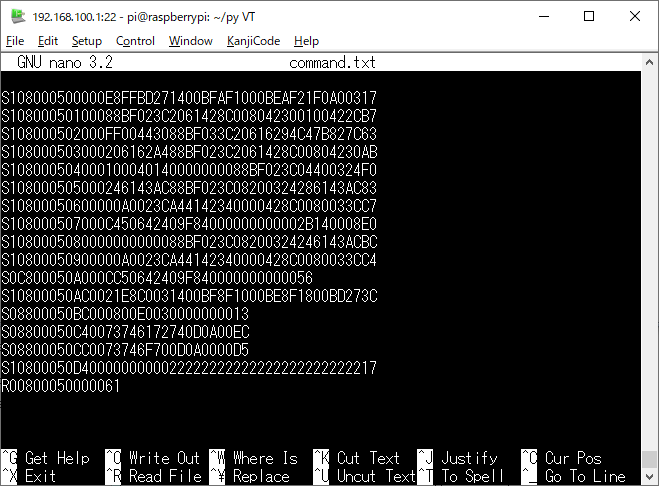
偮傑傝偙偺僼傽僀儖傪丄[UMEHOSHI ITA]偵憲怣偡傞偲丄僾儘僌儔儉傪攝抲偟偰幚峴偱偒傞偙偲偵側傝傑偡丅
師偵偙偺乽UME愱梡Hex僼傽僀儖乿偺乽command.txt乿傪揮憲偡傞python偺僾儘僌儔儉僼傽僀儖傪丄[Raspberry PI]偑懁偱嶌惉偟傑偡丅
pi@raspberrypi:~/py $ nano instruct.py
師偺撪梕偱偡丅乮偙傟傪偙偺夋柺偐傜僐僺乕偟偰丄nano曇廤夋柺偵揬傝晅偗憖嶌偡傞偲娙扨偵嶌傟傑偡乯
import sys
import serial
import threading
import numpy as np
from time import sleep
serial = serial.Serial(port ='/dev/ttyACM0' , baudrate = 115200,timeout = 5)
def check_sum(s):
ck = 0
n = len(s)
if n == 0: return
for i in range(n-2):
ck += ord(s[i])
#print(ck)
print(s[i] , end ="")
print(' ',s[-2:] , end ="")
ck += int(s[-2:] , 16)
ck &= 0x0f
print("僠僃僢僋僒儉丗", ck )
if ck != 0 :
print("僼傽僀儖僼僅乕儅僢僩丒僄儔乕")
exit()
def file_send():
fr=open('command.txt') # 偙偺僼傽僀儖撪梕偑揮憲懳徾偱偡丅
while True:
s = fr.readline()
if s == "" :
break
s = s.strip()#慜屻嬻敀傪彍偔
check_sum(s) # 僼傽僀儖偐傜偺1峴傪妋擣偟丄昞帵
if s.startswith('R'):
input("幚峴僗僞乕僩偺 Enter >>")
serial.write(s.encode('utf-8')) # byte偵曄姺偟偰弌椡
serial.write(b'\r\n') # [UMEHOSHI ITA]USB傊憲怣
sleep(0.1)
#serial.flush()
fr.close()
# 僼傽僀儖擖椡丄USB憲怣 僗儗僢僪偵 file_send 娭悢傪搉偡
t_id = threading.Thread(target=file_send)
t_id.start()# 僼傽僀儖擖椡丄USB憲怣 僗儗僢僪僗僞乕僩
usb_read_loop = True
while usb_read_loop:
b=serial.readline() # binary擖椡
if(b == b''):
usb_read_loop = False
break
s = b.decode('utf-8')
print("USB庴怣仠",b)
#print("USB庴怣仠",s)
input("廔椆妋擣偺 Enter >>>")
serial.close()
埲忋偱嶌惉偟偨乽instruct.py乿偺僼傽僀儖偱丄乽command.txt乿偺UME愱梡Hex僼傽僀儖傪揮憲偟偰幚峴偟偰偄傞憖嶌夋柺傪埲壓偵帵偟傑偡丅
[Raspberry PI]偲[UMEHOSHI ITA]傪USB偱愙懕偟偰丄偦偺帪偺USB僨僶僀僗柤偑乽'/dev/
ttyACM0'乿偱偁傞偙偲傪妋擣偟偰偐傜幚峴偟偰偄傑偡丅
傕偟丄僨僶僀僗柤偑乽'/dev/ttyACM0'乿偱側偗傟偽丄乽instruct.py乿偺僾儘僌儔儉偺僨僶僀僗柤傪曄峏偟偰偔偩偝偄丅
pi@raspberrypi:~/py $ ls -l /dev/serial?
lrwxrwxrwx 1 root root 7 Jun 14 17:17 /dev/serial1 -> ttyACM0
pi@raspberrypi:~/py $
pi@raspberrypi:~/py $ python3 instruct.py
S108000500000E8FFBD271400BFAF1000BEAF21F0A003 17僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000500000E8FFBD271400BFAF1000BEAF21F0A00317\r\n'
USB庴怣仠 b'SET:80005000\r\n'
S10800050100088BF023C2061428C008042300100422C B7僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050100088BF023C2061428C008042300100422CB7\r\n'
USB庴怣仠 b'SET:80005010\r\n'
S108000502000FF00443088BF033C20616294C47B827C 63僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000502000FF00443088BF033C20616294C47B827C63\r\n'
USB庴怣仠 b'SET:80005020\r\n'
S108000503000206162A488BF023C2061428C00804230 AB僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000503000206162A488BF023C2061428C00804230AB\r\n'
USB庴怣仠 b'SET:80005030\r\n'
S108000504000100040140000000088BF023C04400324 F0僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000504000100040140000000088BF023C04400324F0\r\n'
USB庴怣仠 b'SET:80005040\r\n'
S108000505000246143AC88BF023C08200324286143AC 83僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000505000246143AC88BF023C08200324286143AC83\r\n'
USB庴怣仠 b'SET:80005050\r\n'
S10800050600000A0023CA44142340000428C0080033C C7僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050600000A0023CA44142340000428C0080033CC7\r\n'
USB庴怣仠 b'SET:80005060\r\n'
S108000507000C450642409F84000000000002B140008 E0僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000507000C450642409F84000000000002B140008E0\r\n'
USB庴怣仠 b'SET:80005070\r\n'
S1080005080000000000088BF023C08200324246143AC BC僠僃僢僋僒儉丗 0
USB庴怣仠 b'S1080005080000000000088BF023C08200324246143ACBC\r\n'
USB庴怣仠 b'SET:80005080\r\n'
S10800050900000A0023CA44142340000428C0080033C C4僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050900000A0023CA44142340000428C0080033CC4\r\n'
USB庴怣仠 b'SET:80005090\r\n'
S0C800050A000CC50642409F8400000000000 56僠僃僢僋僒儉丗 0
USB庴怣仠 b'S0C800050A000CC50642409F840000000000056\r\n'
USB庴怣仠 b'SET:800050A0\r\n'
S10800050AC0021E8C0031400BF8F1000BE8F1800BD27 3C僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050AC0021E8C0031400BF8F1000BE8F1800BD273C\r\n'
USB庴怣仠 b'SET:800050AC\r\n'
S08800050BC000800E00300000000 13僠僃僢僋僒儉丗 0
USB庴怣仠 b'S08800050BC000800E0030000000013\r\n'
USB庴怣仠 b'SET:800050BC\r\n'
S08800050C40073746172740D0A00 EC僠僃僢僋僒儉丗 0
USB庴怣仠 b'S08800050C40073746172740D0A00EC\r\n'
USB庴怣仠 b'SET:800050C4\r\n'
S08800050CC0073746F700D0A0000 D5僠僃僢僋僒儉丗 0
USB庴怣仠 b'S08800050CC0073746F700D0A0000D5\r\n'
USB庴怣仠 b'SET:800050CC\r\n'
S10800050D40000000000222222222222222222222222 17僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050D4000000000022222222222222222222222217\r\n'
USB庴怣仠 b'SET:800050D4\r\n'
R008000500000 61僠僃僢僋僒儉丗 0
幚峴僗僞乕僩偺 Enter >>
USB庴怣仠 b'R00800050000061\r\n'
USB庴怣仠 b'START:80005000\r\n'
USB庴怣仠 b'start\r\n'
USB庴怣仠 b'\r\n'
廔椆妋擣偺 Enter >>>
pi@raspberrypi:~/py $ python3 instruct.py
S108000500000E8FFBD271400BFAF1000BEAF21F0A003 17僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000500000E8FFBD271400BFAF1000BEAF21F0A00317\r\n'
USB庴怣仠 b'SET:80005000\r\n'
S10800050100088BF023C2061428C008042300100422C B7僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050100088BF023C2061428C008042300100422CB7\r\n'
USB庴怣仠 b'SET:80005010\r\n'
S108000502000FF00443088BF033C20616294C47B827C 63僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000502000FF00443088BF033C20616294C47B827C63\r\n'
USB庴怣仠 b'SET:80005020\r\n'
S108000503000206162A488BF023C2061428C00804230 AB僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000503000206162A488BF023C2061428C00804230AB\r\n'
USB庴怣仠 b'SET:80005030\r\n'
S108000504000100040140000000088BF023C04400324 F0僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000504000100040140000000088BF023C04400324F0\r\n'
USB庴怣仠 b'SET:80005040\r\n'
S108000505000246143AC88BF023C08200324286143AC 83僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000505000246143AC88BF023C08200324286143AC83\r\n'
USB庴怣仠 b'SET:80005050\r\n'
S10800050600000A0023CA44142340000428C0080033C C7僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050600000A0023CA44142340000428C0080033CC7\r\n'
USB庴怣仠 b'SET:80005060\r\n'
S108000507000C450642409F84000000000002B140008 E0僠僃僢僋僒儉丗 0
USB庴怣仠 b'S108000507000C450642409F84000000000002B140008E0\r\n'
USB庴怣仠 b'SET:80005070\r\n'
S1080005080000000000088BF023C08200324246143AC BC僠僃僢僋僒儉丗 0
USB庴怣仠 b'S1080005080000000000088BF023C08200324246143ACBC\r\n'
USB庴怣仠 b'SET:80005080\r\n'
S10800050900000A0023CA44142340000428C0080033C C4僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050900000A0023CA44142340000428C0080033CC4\r\n'
USB庴怣仠 b'SET:80005090\r\n'
S0C800050A000CC50642409F8400000000000 56僠僃僢僋僒儉丗 0
USB庴怣仠 b'S0C800050A000CC50642409F840000000000056\r\n'
USB庴怣仠 b'SET:800050A0\r\n'
S10800050AC0021E8C0031400BF8F1000BE8F1800BD27 3C僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050AC0021E8C0031400BF8F1000BE8F1800BD273C\r\n'
USB庴怣仠 b'SET:800050AC\r\n'
S08800050BC000800E00300000000 13僠僃僢僋僒儉丗 0
USB庴怣仠 b'S08800050BC000800E0030000000013\r\n'
USB庴怣仠 b'SET:800050BC\r\n'
S08800050C40073746172740D0A00 EC僠僃僢僋僒儉丗 0
USB庴怣仠 b'S08800050C40073746172740D0A00EC\r\n'
USB庴怣仠 b'SET:800050C4\r\n'
S08800050CC0073746F700D0A0000 D5僠僃僢僋僒儉丗 0
USB庴怣仠 b'S08800050CC0073746F700D0A0000D5\r\n'
USB庴怣仠 b'SET:800050CC\r\n'
S10800050D40000000000222222222222222222222222 17僠僃僢僋僒儉丗 0
USB庴怣仠 b'S10800050D4000000000022222222222222222222222217\r\n'
USB庴怣仠 b'SET:800050D4\r\n'
R008000500000 61僠僃僢僋僒儉丗 0
幚峴僗僞乕僩偺 Enter >>
USB庴怣仠 b'R00800050000061\r\n'
USB庴怣仠 b'START:80005000\r\n'
USB庴怣仠 b'stop\r\n'
USB庴怣仠 b'\r\n'
廔椆妋擣偺 Enter >>>
pi@raspberrypi:~/py $
忋婰 丂 偺売強偑僉乕擖椡売強偱丄python3 instruct.py傪2夞幚峴偟偰偄傑偡丅
嵟弶偺幚峴偱丄LED偑徚摂偟偰儌乕僞偑夞傝傑偡丅
師偺幚峴偱丄LED偑揰摂偟偰儌乕僞偑巭傑傝傝傑偡丅幚峴偝偣傞偛偲偱丄岎屳偵start偲stop偑峴傢傟傑偡丅