UMEHOSHI ITA TOP PAGE
丂丂丂COMPUTER SHIEN LAB
esp32傪晅偗偨婎斅傪UDP偱墦妘憖嶌
儘儃僢僩偺峔憿
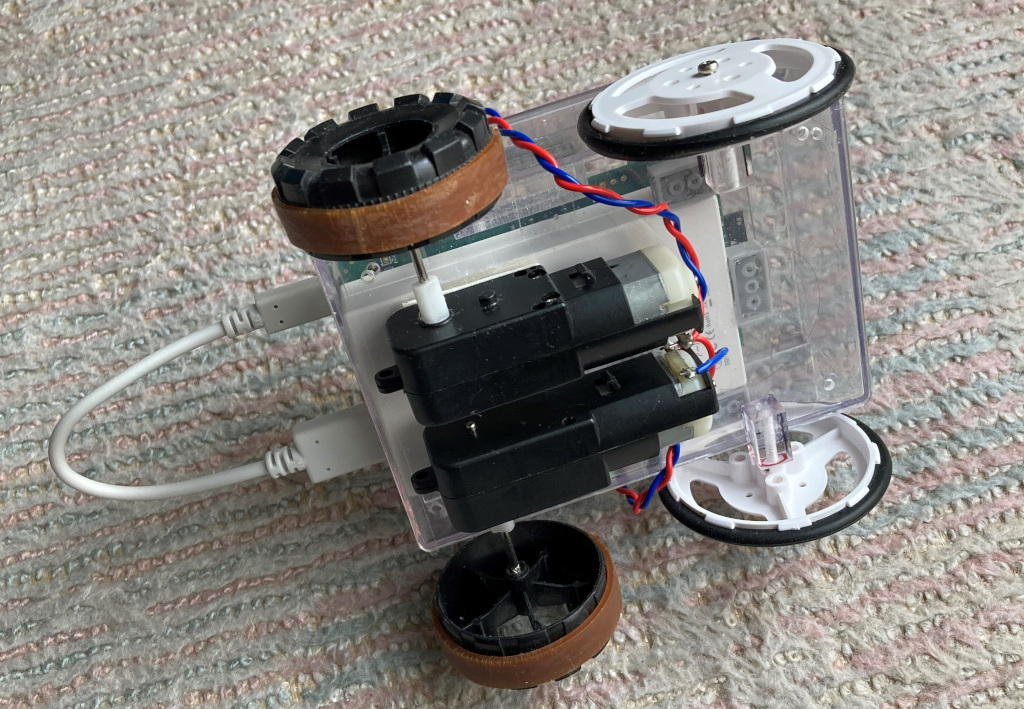
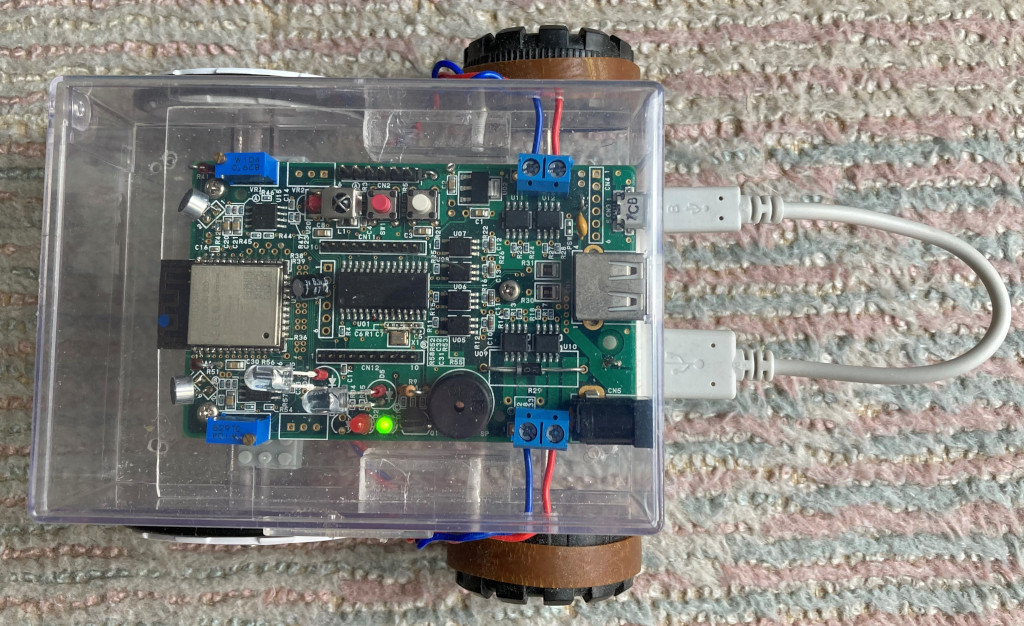
亀俙俛俽庽帀働乕僗乮挶斣幃丒戝乯丂侾侾俀亅俿俵亅俙俛俽乮P-00278乯亁
偵寠側偳偺壛岺傪偟偰丄esp32傪晅偗偨婎斅
偱esp32偵MicroPython 偺僼傽乕儉僂僃傾傪彂偒崬傒偟偨傕偺 偲丄
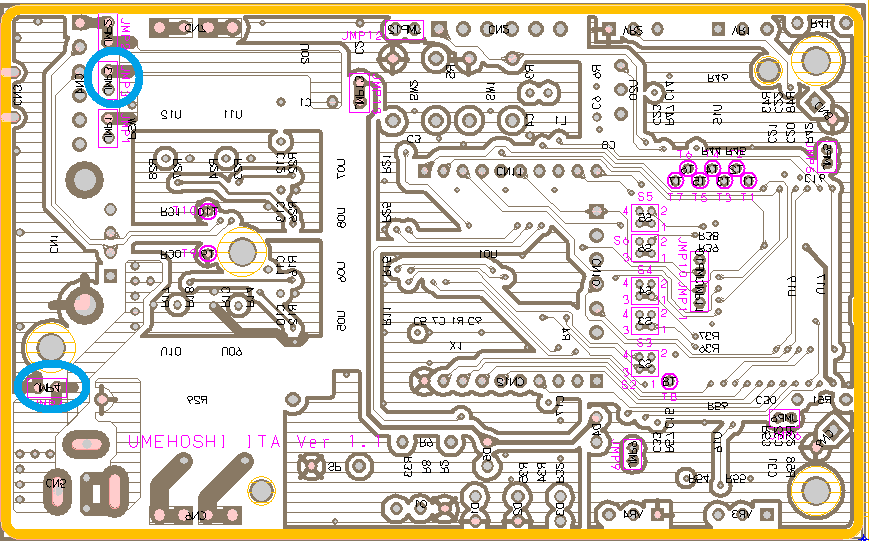
儌乕僞嫙媼偵傕巊偆 傛偆偵偟偰偄傑偡丅PC偺USB揹尮嫙媼偵晧壸偑偐偐傝傑偡丅 偙偺曄峏婎斅偺乽micro B乿偲PC側偳傪愙懕偟偨忬懺偱丄儌乕僞惂屼偼愨懳偵旔偗偰偔偩偝偄丅 偙偺儁乕僕偱帵偟偨傛偆偵 億儕僗僀僢僠傪晅偗傞偙偲偵傛偭偰丄俹俠側偳偺揹尮嫟桳懁偵
懳偡傞曐岇偑摥偒傑偡丅
esp32偵乽傾僋僙僗億僀儞僩乿偲乽UDP偱[UMEHOSHI ITA]傪惂屼乿偺僾儘僌儔儉傪杽傔崬傓
偙偺儁乕僕偱帵偟偰偄傞傛偆偵丄ampy傪巊偭偰 ESP32偵僼傽僀儖傪揮憲偟偰摦嶌偝偣傞 偙偲偑偱偒偰偄傞忬懺傑偱
恑傫偱偄傞慜採偱愢柧偟傑偡丅PC傗僗儅僼僅偲捈愙USB愙懕偟側偄偱丄暿揹尮晅偒偺USB僴僽傪宱桼偟偰愙懕偟偨曽偑椙偄偱偟傚偆丅 UART1僐儅儞僪儌乕僪 偙偺儕儞僋偱嶌惉偟偨丄傾僋僙僗億僀儞僩梡偺僾儘僌儔儉偺setap.py 偱
梋寁側print()傪彍偄偰師偺傛偆偵曄峏偟傑偡丅
import time # setap.py
time.sleep(5)
import network
ap = network.WLAN(network.AP_IF) # create access-point interface
ap.config(essid='ESP-AP') # set the ESSID of the access point
ap.config(max_clients=10) # set how many clients can connect to the network
ap.ifconfig(('192.168.222.1', '255.255.255.0', '192.168.222.1', '8.8.8.8'))
# set (ip address, subnet mast, default gateway, dns ip address)
ap.active(True) # activate the interface
偙偺setap.py偺僼傽僀儖傪丄師偺憖嶌偱丄[UMEHOSHI ITA]傊揮憲偟傑偡丅
ampy -p COM8 -b 11500 put setap.py
偦偟偰丄摨帪偵師偺傛偆側boot.py傪丄ampy -p COM8 -b 11500 put boot.py 偱揮憲偟傑偡丅
# This file is executed on every boot (including wake-boot from deepsleep)
#import esp
#esp.osdebug(None)
#import webrepl
#webrepl.start()
import setap
#import udpsvrUme
#import udpsvrEsp
偙傟偼丄尦乆偁偭偨婰弎偵setap.py傪婲摦帪偵幚峴偣傞偨傔丄import setap傪捛壛偟偰偄傑偡丅UART1僐儅儞僪儌乕僪 乽僂儊丒僄僨傿僢僩僾儘僌儔儉乿 偺僜乕僗僐乕僪偼丄
#include <xc.h> // app_pwm_esp.c
#include "common.h"
#define AdrStart 0x80005000 // 傾僾儕偺婲摦帪偺弶婜儖乕僠儞偺傾僪儗僗
#define AdrTimer2 0x80005B00 // 巜掕帪娫屻偵儌乕僞掆巭偺Timer2梡傾僪儗僗
#define AdrForward 0x80005200 // 儌乕僞慜恑儖乕僠儞偺傾僪儗僗
#define AdrGoBack 0x80005300 // 儌乕僞屻恑儖乕僠儞偺傾僪儗僗
#define AdrRight 0x80005400 // 儌乕僞塃夞揮儖乕僠儞偺傾僪儗僗
#define AdrLeft 0x80005500 // 儌乕僞嵍夞揮儖乕僠儞偺傾僪儗僗
#define AdrUpLeft 0x80005600 // 儌乕僞嵍僨儏乕僥傿暆傾僢僾
#define AdrDownLeft 0x80005700 // 儌乕僞嵍僨儏乕僥傿暆僟僂儞
#define AdrUpRight 0x80005800 // 儌乕僞塃僨儏乕僥傿暆傾僢僾
#define AdrDownRight 0x80005900 // 儌乕僞塃僨儏乕僥傿暆僟僂儞
#define AdrStop 0x80005A00 // 儌乕僞掆巭
#define AdrBeep 0x80005D00 // 價乕僾壒
#define UPDAOWN 0x1000 // 僨儏乕僥傿暆偺曄峏偱巊偆抣乮偙偺抣傪壛嶼枖偼尭嶼乯
// 嵍塃偺儌乕僞偱丄恑峴偵僶儔僣僉偑偁傞応崌丄壓婰弶婜愝掕傪挷惍偟偰崌傢偣傞丅
int cn6PWM = 0x0DFFF; // 尰嵼偺嵍僨儏乕僥傿暆偱丄弶婜愝掕
int cn7PWM = 0x0FFFF; // 尰嵼偺塃僨儏乕僥傿暆偱丄弶婜愝掕
int time2Count = 0;//Timer2妱傝崬傒偱僇僂儞僩傾僢僾(壓婰stopCount傑偱僇僂儞僩)
int stopCount = 0x500;// time2Count偑stopCount埲忋偱丄time2Count偑傪僛儘偵偟偰儌乕僞傪OFF
// 壓婰偼丄儌乕僞傪曅曽偢偮岎屳偵巊偆帪偵0埲奜傪巜掕偡傞丅(掅埑崅揹棳宆儌乕僞偱巊偆応崌偁傝乯
int oneMCount = 0;// oneCN6乣oneCN7偺娫偱丄oneCN6偑晧偱Timer2偱僇僂儞僩傾僢僾
int oneCN6 = 0 ;//-50;// CN6偺ON僞僀儈儞僌傪晧偺Timer2偱僇僂儞僩悢偱巜掕
int oneCN7 = 50; // CN7偺ON僞僀儈儞僌傪Timer2偱僇僂儞僩悢偱巜掕
void setCN6(int);// 嵍梡 CN6僐僱僋僞偺惂屼 d偺抣 0掆巭, 1:惓揮, -1:媡揮
void setCN7(int);// 塃梡 CN7僐僱僋僞偺惂屼 d偺抣 0掆巭, 1:惓揮, -1:媡揮
void stop();// PWM 傪掆巭
void beep();
__attribute__((address( AdrStart ))) void start (void);
void start()
{
PORTBCLR = 0b0110000000001100;//儌乕僞娭楢億乕僩乮14,13,3,2乯傪僛儘偵偡傞
// 弶婜壔儖乕僠儞乮儕僙僢僩帪偺張棟乯傪愝掕
( (uint32_t *)_HANDLES)[_IDX_INIT_SUB_FUNC] = (uint32_t ) AdrStart;
__asm__ ("NOP");
IEC0CLR = 0x00000200;//T2IE Timer2 Enable乮妱崬傒晄壜嫋壜乯");
( (uint32_t *)_HANDLES)[_IDX_TIMER_2_FUNC] = (uint32_t ) AdrTimer2;
PR2=0x8FFF;
IEC0SET = 0x00000200;//T2IE Timer2 Enable乮妱崬傒嫋壜乯");
_set_pwd_mode(1); // PWM 儌乕僪傊曄峏
T2CONbits.ON = 1; //Timer2偺婡擻傪桳岠
time2Count =0;
_RB15 = 0;
_clear_beep_code();
_set_beep_code((uint8_t)0b00100011);//壒僷僞乕儞[丒丒亅]偺搊榐
_UM_PTR_GOTO_BEEP = NULL;//儖乕僾惗惉OFF
}
// 僞僀儅乕偱乮stopCount 抣偵払偡傞傑偱乯偺帪娫偛偲偵丄儌乕僞傪掆巭偡傞丅
// 乮儌乕僞偑僆儞偱丄堏摦偟懕偗側偄傛偆偵偡傞峫椂偱丄柍偔偰傕傛偄張棟丠乯
__attribute__((address( AdrTimer2))) void timer2(void);
void timer2()
{
IFS0CLR = 0x00000200; // Clear the timer interrupt status flag
if( ++time2Count >= stopCount ){
// stop();// PWM 僷儖僗暆傪0
_RB15 = 0; // LED1徚摂
}
// CN6,CN7偺儌乕僞傪岎屳偵巊偆
if(oneCN6 < 0 && oneMCount++ < 0){
OC5CONbits.ON=OC1CONbits.ON=1; // PWM CN6桳岠
OC3CONbits.ON=OC4CONbits.ON=0; // PWM CN7柍岠
} else if(oneCN6 < 0 && oneCN7 > 0){
OC5CONbits.ON=OC1CONbits.ON=0; // PWM CN6柍岠
OC3CONbits.ON=OC4CONbits.ON=1; // PWM CN7桳岠
if( oneMCount > oneCN7){
oneMCount = oneCN6;
}
}
}
// 儌乕僞傪掆巭偡傞丅
__attribute__((address( AdrStop))) void stop(void);
void stop()
{
//time2Count = 0;
OC5RS = OC1RS = OC4RS = OC3RS = 0;// 儌乕僞偡傋偰傪OFF
}
// 儌乕僞慜恑儖乕僠儞
__attribute__((address( AdrForward ))) void forward(void);
void forward()
{
time2Count = 0;
setCN6( 1 );// 嵍惓揮
setCN7( 1 );// 塃惓揮
_RB15 = ! _RB15;//妋擣梡偺LED1揰摂斀揮
}
// 儌乕僞屻恑儖乕僠儞
__attribute__((address( AdrGoBack ))) void goback(void);
void goback()
{
time2Count = 0;
setCN6( -1 );// 嵍媡揮
setCN7( -1 );// 塃媡揮
_RB15 = ! _RB15;//妋擣梡偺LED1揰摂斀揮
}
// 儌乕僞塃夞揮儖乕僠儞
__attribute__((address( AdrRight ))) void right(void);
void right()
{
time2Count = 0;
setCN6( 1 );// 嵍惓揮
setCN7( -1 );// 塃媡揮
_RB15 = ! _RB15;//妋擣梡偺LED1揰摂斀揮
}
// 儌乕僞嵍夞揮儖乕僠儞
__attribute__((address( AdrLeft ))) void left(void);
void left()
{
time2Count = 0;
setCN6( -1 );// 嵍媡揮
setCN7( 1 );// 塃惓揮
_RB15 = ! _RB15;//妋擣梡偺LED1揰摂斀揮
}
// 儌乕僞嵍僨儏乕僥傿暆傾僢僾儖乕僠儞
__attribute__((address( AdrUpLeft ))) void upleft(void);
void upleft()
{
//_send_hex_low( cn6PWM );
if( cn6PWM +UPDAOWN <= 0x0ffff){
cn6PWM += UPDAOWN ;
//_send_string(" Left UP\r\n");
} else {
beep();
//_send_string(" Left FULL\r\n");
}
_RB15 = ! _RB15;//妋擣梡偺LED1揰摂斀揮
}
// 儌乕僞嵍僨儏乕僥傿暆僟僂儞儖乕僠儞
__attribute__((address( AdrDownLeft ))) void downleft(void);
void downleft()
{
//_send_hex_low( cn6PWM );
if( cn6PWM - UPDAOWN >= 0){
cn6PWM -= UPDAOWN ;
//_send_string(" Left DOWN\r\n");
} else {
beep();
//_send_string(" Left Minimum\r\n");
}
_RB15 = ! _RB15;//妋擣梡偺LED1揰摂斀揮
}
//儌乕僞塃僨儏乕僥傿暆傾僢僾
__attribute__((address( AdrUpRight ))) void upright(void);
void upright()
{
//_send_hex_low( cn7PWM );
if( cn7PWM +UPDAOWN <= 0x0ffff){
cn7PWM += UPDAOWN ;
//_send_string(" Right UP\r\n");
} else {
beep();
//_send_string(" Right FULL\r\n");
}
_RB15 = ! _RB15;//妋擣梡偺LED1揰摂斀揮
}
// 儌乕僞塃僨儏乕僥傿暆僟僂儞
__attribute__((address( AdrDownRight ))) void downright(void);
void downright()
{
//_send_hex_low( cn7PWM );
if( cn7PWM -UPDAOWN >= 0){
cn7PWM -= UPDAOWN ;
//_send_string(" Right DOWN\r\n");
} else {
beep();
//_send_string("Right Minimum\r\n");
}
_RB15 = ! _RB15;//妋擣梡偺LED1揰摂斀揮
}
__attribute__((address( AdrBeep ))) void beep (void);
void beep()
{
_clear_beep_code();
_set_beep_code((uint8_t)0b111100100);//壒僷僞乕儞[亅亅亅亅]偺搊榐
_UM_PTR_GOTO_BEEP = NULL;//儖乕僾惗惉OFF
}
// CN6乮嵍懁乯 僐僱僋僞偺惂屼 d偺抣 0掆巭, 1:惓揮, -1:媡揮
void setCN6( int d){
time2Count=0;
OC5RS = 0x0; // CN6[1-2]惂屼乮RB2乯
OC1RS = 0x0; // CN6[3-4]惂屼乮RB3乯
if(d==1){
OC5RS = cn6PWM; // CN6[1-2]惂屼乮RB2乯
OC1RS = 0x0; // CN6[3-4]惂屼乮RB3乯
} else if(d==-1){
OC5RS = 0x0; // CN6[1-2]惂屼乮RB2乯
OC1RS = cn6PWM; // CN6[3-4]惂屼乮RB3乯
}
}
// CN7乮塃懁乯 僐僱僋僞偺惂屼 d偺抣 0掆巭, 1:惓揮, -1:媡揮
void setCN7( int d){
time2Count=0;
OC4RS = 0x0; // CN7[3-4]惂屼乮RB13乯
OC3RS = 0x0; // CN7[1-2]惂屼乮RB14乯
if(d==1){
OC4RS = cn7PWM; // CN7[3-4]惂屼乮RB13乯
OC3RS = 0x0; // CN7[1-2]惂屼乮RB14乯
} else if(d==-1){
OC4RS = 0x0; // CN7[3-4]惂屼乮RB13乯
OC3RS = cn7PWM; // CN7[1-2]惂屼乮RB14乯
}
}
偙偺僐乕僪偼丄僗儅僼僅偱偺惂屼梡偵嶌偭偨僐乕僪乮app_pwm.c乯 傪
彮偟曄峏偟偨傕偺偱偡丅hex忣曬傪丄udpsvrUme.py偵杽傔崬傫偱 丄[UMEHOSHI ITA]傊揮憲偡傞栿偱偡丅
import time # udpsvrUme.py
time.sleep(2)
cmd='''S048000800000FFDF000083
S048000800400FFFF00007D
S04800080080000050000CC
S048000800C0032000000C1
S04800080100000000000D8
S04800080140000000000D4
S04800080180000000000D0
S1080005B0000F8FFBD270400BEAF21F0A00388BF023C05
S1080005B100000020324341043AC0180023C1080428CC3
S1080005B2000010043240180023C108043AC0180023CC7
S1080005B30001080438C0180023C0880428C2A106200B1
S1080005B4000050040140000000088BF033C20616294CC
S1080005B5000C47B027C206162A40180023C1880428C83
S1080005B60001C004104000000000180023C1480428CDB
S1080005B7000010044240180033C148064AC15004104CB
S1080005B8000000000000100042480BF033C00306294D9
S1080005B9000C47B827C003062A480BF033C0038629467
S1080005BA000C47B827C003862A42120000080BF033C72
S1080005BB00000366294C47B827C003662A480BF033C5A
S1080005BC00000346294C47B827C003462A41A17000884
S1080005BD000000000000180023C1880428C22004104D9
S1080005BE000000000000180023C0C80428C1E004018B8
S1080005BF000000000002120000080BF033C00306294D1
S1080005C0000C47B827C003062A480BF033C003862946F
S1080005C1000C47B827C003862A40100042480BF033C7B
S1080005C200000366294C47B827C003662A480BF033C69
S1080005C300000346294C47B827C003462A40180023C94
S1080005C40001480438C0180023C0C80428C2A104300A1
S1080005C500005004010000000000180023C1880438CE9
S0880005C60000180023C148043ACE6
S1080005C680021E8C0030400BE8F0800BD270800E00368
S0480005C780000000000BA
S108000500000E8FFBD271400BFAF1000BEAF21F0A00317
S10800050100088BF023C0C600324246143AC00A0023C8B
S108000502000C84042340080033C00506334000043ACD0
S1080005030000000000088BF023C00020324641043ACCB
S10800050400000A0023C504042340080033C005B6334D4
S108000505000000043AC80BF023CFF8F0334200843AC5E
S10800050600088BF023C00020324681043AC00A0023C9B
S108000507000B84042340000428C09F8400001000424D6
S10800050800080BF033C0008629401000424C47B827C92
S108000509000000862A40180023C108040AC88BF033C8E
S10800050A00020616294C47B027C206162A400A0023C95
S10800050B000F44142340000428C09F8400000000000D5
S10800050C00000A0023CF04142340000428C09F84000AF
S10800050D0002300042400A0023CFC414234000040ACB0
S10800050E00021E8C0031400BF8F1000BE8F0800E00363
S04800050F0001800BD278E
S108000560000E8FFBD271400BFAF1000BEAF21F0A00311
S1080005610000180023C0080428C001043240100023CE7
S1080005620002A10620008004010000000000180023C0D
S1080005630000080428C001043240180023C008043ACCB
S088000564000941500080000000033
S0880005648004017000C0000000027
S10800056500088BF023C2061428C008042300100422CAD
S108000566000FF00443088BF033C20616294C47B827C59
S108000567000206162A421E8C0031400BF8F1000BE8F65
S0C80005680001800BD270800E0030000000067
S108000580000E8FFBD271400BFAF1000BEAF21F0A0030F
S1080005810000180023C0480428C001043240100023CE1
S1080005820002A10620008004010000000000180023C0B
S1080005830000480428C001043240180023C048043ACC1
S088000584000141600080000000038
S0880005848004017000C0000000025
S10800058500088BF023C2061428C008042300100422CAB
S108000586000FF00443088BF033C20616294C47B827C57
S108000587000206162A421E8C0031400BF8F1000BE8F63
S0C80005880001800BD270800E0030000000065
S108000570000E8FFBD271400BFAF1000BEAF21F0A00310
S1080005710000180023C0080428C00F0422408004004DB
S108000572000000000000180023C0080428C00F04324E9
S1080005730000180023C008043ACD215000800000000DD
S0880005740004017000C000000002E
S10800057480088BF023C2061428C008042300100422CA5
S108000575800FF00443088BF033C20616294C47B827C51
S108000576800206162A421E8C0031400BF8F1000BE8F5D
S0C80005778001800BD270800E003000000005F
S108000590000E8FFBD271400BFAF1000BEAF21F0A0030E
S1080005910000180023C0480428C00F0422408004004D5
S108000592000000000000180023C0480428C00F04324E3
S1080005930000180023C048043AC5216000800000000E5
S0880005940004017000C000000002C
S10800059480088BF023C2061428C008042300100422CA3
S108000595800FF00443088BF033C20616294C47B827C4F
S108000596800206162A421E8C0031400BF8F1000BE8F5B
S0C80005978001800BD270800E003000000005D
S108000520000E8FFBD271400BFAF1000BEAF21F0A00315
S1080005210000180023C108040AC010004245817000CD7
S10800052200000000000010004247F17000C0000000018
S10800052300088BF023C2061428C008042300100422CB3
S108000524000FF00443088BF033C20616294C47B827C5F
S108000525000206162A421E8C0031400BF8F1000BE8F6B
S0C80005260001800BD270800E003000000006D
S108000530000E8FFBD271400BFAF1000BEAF21F0A00314
S1080005310000180023C108040ACFFFF04245817000C7F
S10800053200000000000FFFF04247F17000C00000000C0
S10800053300088BF023C2061428C008042300100422CB2
S108000534000FF00443088BF033C20616294C47B827C5E
S108000535000206162A421E8C0031400BF8F1000BE8F6A
S0C80005360001800BD270800E003000000006C
S108000540000E8FFBD271400BFAF1000BEAF21F0A00313
S1080005410000180023C108040AC010004245817000CD5
S10800054200000000000FFFF04247F17000C00000000BF
S10800054300088BF023C2061428C008042300100422CB1
S108000544000FF00443088BF033C20616294C47B827C5D
S108000545000206162A421E8C0031400BF8F1000BE8F69
S0C80005460001800BD270800E003000000006B
S108000550000E8FFBD271400BFAF1000BEAF21F0A00312
S1080005510000180023C108040ACFFFF04245817000C7D
S10800055200000000000010004247F17000C0000000015
S10800055300088BF023C2061428C008042300100422CB0
S108000554000FF00443088BF033C20616294C47B827C5C
S108000555000206162A421E8C0031400BF8F1000BE8F68
S0C80005560001800BD270800E003000000006A
S1080005D0000E8FFBD271400BFAF1000BEAF21F0A00303
S1080005D100000A0023CF44142340000428C09F84000A9
S1080005D20000000000000A0023CF04142340000428CD7
S1080005D3000E400042409F840000000000000A0023CD1
S1080005D4000FC414234000040AC21E8C0031400BF8F63
S1080005D50001000BE8F1800BD270800E00300000000A8
S1080005A0000F8FFBD270400BEAF21F0A0032110000052
S1080005A100080BF033C203462AC80BF033C203662AC4F
S1080005A200080BF033C203062AC80BF033C203862AC50
S1080005A300021E8C0030400BE8F0800BD270800E00375
S0480005A400000000000C7
S1080005D6000F8FFBD270400BEAF21F0A0030800C4AF07
S1080005D70000180023C108040AC80BF023C203840AC75
S1080005D800080BF023C203040AC0800C38F0100022489
S1080005D90000A006214000000000180023C0080428CDA
S1080005DA0002118400080BF023C203843AC80BF023C62
S1080005DB000203040AC7A170008000000000800C38FA8
S1080005DC000FFFF0224080062140000000080BF023C7B
S1080005DD000203840AC0180023C0080428C21184000A8
S1080005DE00080BF023C203043AC21E8C0030400BE8F3F
S0C80005DF0000800BD270800E003000000004C
S1080005DFC00F8FFBD270400BEAF21F0A0030800C4AFE4
S1080005E0C000180023C108040AC80BF023C203640AC6A
S1080005E1C0080BF023C203440AC0800C38F0100022478
S1080005E2C000A006214000000000180023C0480428CC9
S1080005E3C002118400080BF023C203643AC80BF023C5E
S1080005E4C00203440ACA1170008000000000800C38FA4
S1080005E5C00FFFF0224080062140000000080BF023C75
S1080005E6C00203640AC0180023C0480428C21184000A0
S1080005E7C0080BF023C203443AC21E8C0030400BE8F35
S0C80005E8C000800BD270800E0030000000046
S108000568C00008000801000000001000000FFDF0000D6
S108000569C00FFFF0000000500003200000010800080CA
S10800056AC000C00000000000000000000002222222212
R00800050000061
'''
print(cmd)
[UMEHOSHI ITA]偱柦椷庴偗晅偗偼丄婲摦屻4昩掱搙偺弶婜愝掕儌乕僪偑偁傞偨傔偡偖庴偗晅偗傑偣傫丅
import _thread
flag_input_loop=True
def input_loop():
global flag_input_loop
for n in range(1000):
if flag_input_loop == False: break
s=input("")
if s.startswith("START") : break
thread_id = _thread.start_new_thread(input_loop, ())
input("") 偼ESP偺UART偐傜偺庴怣偱偡偑僼儘乕惂屼偑惓偟偔偱偒側偄偨傔丄尰嵼偼偙偺僐乕僪傪巊偭偰偄傑偣傫丅
ampy -p COM8 -b 11500 put udpsvrUme.py
婲摦帪偵帺摦幚峴偝偣傞MicroPython僾儘僌儔儉偱偼僗儗僢僪埲奜偱儖乕僾傪嶌傞偙偲偼婋尟側偺偱旔偗偨曽偑傛偄偱偟傚偆丅
import machine
machine.reset()
師偺傛偆偵丄乽import udpsvrUme乿傪擖椡偡傞偲丄[UMEHOSHI ITA]偵憲傞傋偒暥帤楍偑楍嫇偝傟偰僾儘儞僾僩偑偱傟偽OK偱偡丅
>>> import udpsvrUme
S048000800000FFDF000083
S048000800400FFFF00007D
丒丒丒丒徣棯丒丒丒丒丒
R00800050000061
>>>
[UMEHOSHI ITA]偑UART1僐儅儞僪儌乕僪偱偁傟偽丄偙偺print偵傛傞昞帵撪梕偑丄[UMEHOSHI ITA]傊偺惂屼柦椷偵側傝傑偡丅
惂屼撪梕 幚峴偝偣傞応崌偺[UMEHOSHI ITA]柦椷(愨懳傾僪儗僗偱偺屇傃弌偟昞尰) 慜恑("Forward") "R0080005200005F" 屻恑("Back") "R0080005300005E" 塃夞揮("Right") "R0080005400005D" 嵍夞揮("Left") "R0080005500005C" 嵍偺PWM偺ON偺僨儏乕僥傿乕斾傪傾僢僾偡傞("UpLeft") "R0080005600005B" 嵍偺PWM偺ON偺僨儏乕僥傿乕斾傪僟僂儞偡傞("DownLeft") "R0080005700005A" 塃偺PWM偺ON偺僨儏乕僥傿乕斾傪傾僢僾偡傞("UpRight") "R00800058000059" 塃偺PWM偺ON偺僨儏乕僥傿乕斾傪僟僂儞偡傞("DownRight") "R00800059000058" PWM偺僗僩僢僾("Stop") "R0080005A000050" 僽僓乕傪柭傜偡("Beep") "R0080005D00004D"
UDP偱庴怣偟偨僇僢僐撪暥帤楍偱丄[UMEHOSHI ITA]傊柦椷傪憲傞偨傔偺ESP32梡偺MicroPython梡僼傽僀儖乮udpsvrEsp.py乯傪壓婰偵帵偟傑偡丅
import setap # udpsvrEsp.py
import socket
sock=socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
local_addr=("192.168.222.1", 3001)
sock.bind(local_addr)
SIZE = 32
import _thread
def receive_loop():
while True:
msg, client_addr = sock.recvfrom(SIZE)
s=msg.decode()
if s.startswith("Forward") :
print("R0080005200005F")
elif s.startswith("Back") :
print("R0080005300005E")
elif s.startswith("Right") :
print("R0080005400005D")
elif s.startswith("Left") :
print("R0080005500005C")
elif s.startswith("UpLeft") :
print("R0080005600005B")
elif s.startswith("DownLeft") :
print("R0080005700005A")
elif s.startswith("UpRight") :
print("R00800058000059")
elif s.startswith("DownRight") :
print("R00800059000058")
elif s.startswith("Stop") :
print("R0080005A000050")
elif s.startswith("ServerStop") :
break
else:
print("R0080005D00004D")
#
sock.close()
thread_id = _thread.start_new_thread(receive_loop, ())
忋婰偺udpsvrEsp.py偺僼傽僀儖傪丄師偺憖嶌偱ESP32傊揮憲偟傑偡丅
ampy -p COM8 -b 11500 put udpsvrEsp.py
揮憲屻偵USB偱PC偲愙懕偟捈偟丄[UMEHOSHI ITA]傪僗儖乕儌乕僪偱婲摦偟傑偡丅
>>> import udpsvrEsp # 偙偺峴偱USB庴怣儖乕僾偑巒傑傝傑偡丅
R0080005200005F
PC懁偵偍偄偰丄UDP偱"Forward"偺傛側惂屼暥帤傪憲怣偡傞師偺傛偆側僾儘僌儔儉(pc_udp_esp32.py)偱丄
摦嶌傪妋擣偡傞偲傛偄偱偟傚偆丅
import socket # (pc_udp_esp32.py)
import _thread
UDP_IP = "192.168.222.1"
UDP_PORT = 3001
def sendCommand(cmd):
send_len=sockSend.sendto(cmd.encode('utf-8'), sever_addr)
print(cmd.strip(), send_len, "byte 憲怣偟傑偟偨")
sockSend=socket.socket(socket.AF_INET, type=socket.SOCK_DGRAM)
sever_addr=(UDP_IP,UDP_PORT )#IP傾僪儗僗偲億乕僩斣崋
m_f=m_b=m_r=m_l=False # 慜恑僼儔僌, 屻恑僼儔僌, 塃夞揮僼儔僌, 嵍夞揮僼儔僌
while True:
s=input("W/A/X/D/S/+/-/y/h/u/j/QUIT/Q==>").upper()
if s.startswith("W") :
m_f=m_b=m_r=m_l=False
m_f=True
elif s.startswith("A") :
m_f=m_b=m_r=m_l=False
m_l=True
elif s.startswith("X") :
m_f=m_b=m_r=m_l=False
m_b=True
elif s.startswith("D") :
m_f=m_b=m_r=m_l=False
m_r=True
elif s.startswith("S") :
sendCommand("Stop\r\n")
m_f=m_b=m_r=m_l=False
elif s.startswith("+") :
sendCommand("UpLeft\r\n")
sendCommand("UpRight\r\n")
elif s.startswith("-") :
sendCommand("DownLeft\r\n")
sendCommand("DownRight\r\n")
elif s.startswith("Y") :sendCommand("UpLeft\r\n")
elif s.startswith("H") :sendCommand("DownLeft\r\n")
elif s.startswith("U") :sendCommand("UpRight\r\n")
elif s.startswith("J") :sendCommand("DownRight\r\n")
elif s.startswith("QUIT") :
sendCommand("ServerStop\r\n")
elif s.startswith("Q") :
break
else:
sendCommand("Beep\r\n")
continue
#
if m_f :
sendCommand("Forward\r\n")
elif m_l:
sendCommand("Left\r\n")
elif m_b :
sendCommand("Back\r\n")
elif m_r :
sendCommand("Right\r\n")
#
sockSend.close()
[UMEHOSHI ITA]傪僗儖乕儌乕僪偱偼丄僞乕儈僫儖偵"R0080005200005F"偺傛偆側
乽UME愱梡Hex僐儅儞僪乿偑昞帵偝傟偰丄儌乕僞偑夞傞傢偗偱偼偁傝傑偣傫丅
import setap
import udpsvrUme
import udpsvrEsp
偙傟傪丄師偺憖嶌偱esp32偵揮憲偟傑偡丅
ampy -p COM8 -b 11500 put boot.py
埲忋偱弌棃忋偑傝偱偡丅 PC偺USB愙懕偼奜偟偰丄USB(A-Type)傪儌僶僀儖僶僢僥儕乕偵愙懕偟捈偟傑偡丅 儕僙僢僩偺SW1傪墴偟側偑傜SW2傪墴偟丄SW1傪棧偟偰LED1偑徚摂偐傜揰摂偵曄傢傞傑偱SW2傪墴偟懕偗傑偡丅 埲壓偼
PC懁偱Wifi愙懕偟偰 pc_udp_esp32.py傪幚峴偟丄PC懁傛傝UDP偵傛傞暥帤楍憲怣偱墦妘憖嶌傪偟偰偄傞椺偱偡丅
R:\MicroPythonFolder>python pc_udp_esp32.py
W/A/X/D/S/+/-/y/h/u/j/QUIT/Q==>w
Forward 9 byte 憲怣偟傑偟偨
W/A/X/D/S/+/-/y/h/u/j/QUIT/Q==>a
Left 6 byte 憲怣偟傑偟偨
W/A/X/D/S/+/-/y/h/u/j/QUIT/Q==>x
Back 6 byte 憲怣偟傑偟偨
W/A/X/D/S/+/-/y/h/u/j/QUIT/Q==>d
Right 7 byte 憲怣偟傑偟偨
W/A/X/D/S/+/-/y/h/u/j/QUIT/Q==>s
Stop 6 byte 憲怣偟傑偟偨
W/A/X/D/S/+/-/y/h/u/j/QUIT/Q==>q
R:\MicroPythonFolder>
摦嶌傪摦夋偱徯夘偟傑偡
偙偺Click偱Youtube 徯夘摦夋傊堏摦偱偒傑偡丅 VIDEO